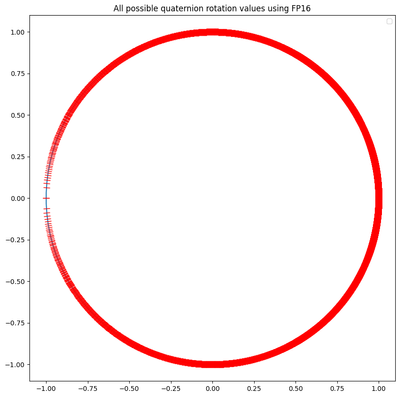
LSM6DSV half precision error at ~180 degrees
Hi,We're using the lsm6dsv's SFLP algorithm to calculate IMU rotation. Recently however we noticed that the resulting rotation has big gaps at around the 180degree mark. We believe this is because of the half float precision, specifically because the...