Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Products
- USART TRANSMITTING THE VARIABLE AS 0
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
USART TRANSMITTING THE VARIABLE AS 0
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-17 11:19 AM
Hı everyone
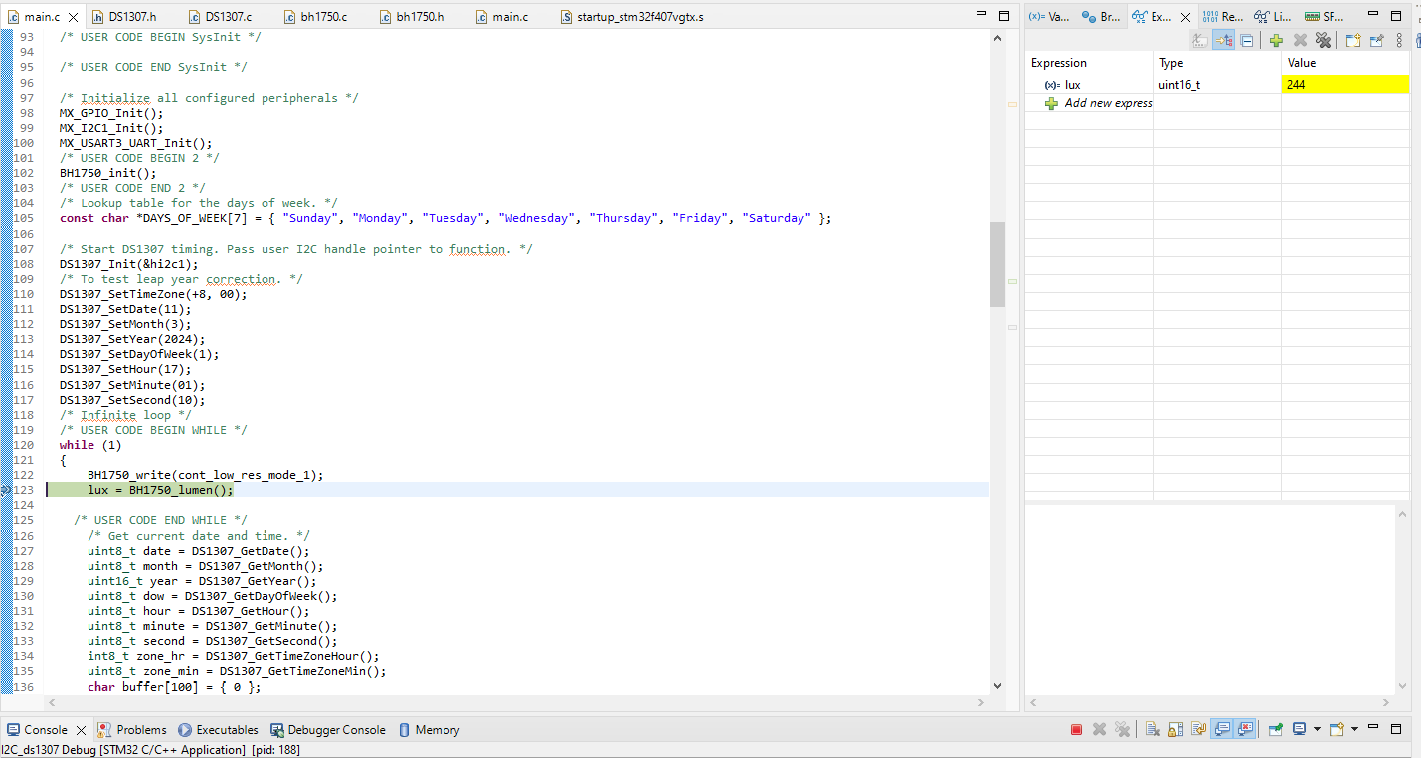
I was trying to send the data to termite terminal. The data variables are coming from DS1307 (RTC Module) and BH1750 (Lux) sensor. However, The data coming from lux sensor is zero in termite. Rtc module variable is okey. Lux sensor variable is declared as lux. When ı debuged it, ı can see lux value properly but the USART transmit 0. By the way, both of sensor is connected to I2C1 bus. I have Stm32f4 discovery kit. How can ı solve that ?
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "DS1307.h"
#include "bh1750.h"
#include <stdio.h>
#include <string.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
char tx_buff[50];
uint16_t lux=0;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
UART_HandleTypeDef huart3;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_USART3_UART_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
BH1750_init();
/* USER CODE END 2 */
/* Lookup table for the days of week. */
const char *DAYS_OF_WEEK[7] = { "Sunday", "Monday", "Tuesday", "Wednesday", "Thursday", "Friday", "Saturday" };
/* Start DS1307 timing. Pass user I2C handle pointer to function. */
DS1307_Init(&hi2c1);
/* To test leap year correction. */
DS1307_SetTimeZone(+8, 00);
DS1307_SetDate(11);
DS1307_SetMonth(3);
DS1307_SetYear(2024);
DS1307_SetDayOfWeek(1);
DS1307_SetHour(17);
DS1307_SetMinute(01);
DS1307_SetSecond(10);
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
BH1750_write(cont_low_res_mode_1);
lux = BH1750_lumen();
/* USER CODE END WHILE */
/* Get current date and time. */
uint8_t date = DS1307_GetDate();
uint8_t month = DS1307_GetMonth();
uint16_t year = DS1307_GetYear();
uint8_t dow = DS1307_GetDayOfWeek();
uint8_t hour = DS1307_GetHour();
uint8_t minute = DS1307_GetMinute();
uint8_t second = DS1307_GetSecond();
int8_t zone_hr = DS1307_GetTimeZoneHour();
uint8_t zone_min = DS1307_GetTimeZoneMin();
char buffer[100] = { 0 };
char lux_buffer[50];
/*
sprintf(buffer, "ISO8601 FORMAT: %04d-%02d-%02dT%02d:%02d:%02d%+03d:%02d %s\n",
year, month, date, hour, minute, second, zone_hr, zone_min, DAYS_OF_WEEK[dow]);
*/
sprintf(buffer, "%04d-%02d-%02dT%02d:%02d:%02d%+03d:%02d %s\n",
year, month, date, hour, minute, second, zone_hr, zone_min, DAYS_OF_WEEK[dow]);
sprintf(lux_buffer,"Lux = %d\n",lux);
HAL_UART_Transmit(&huart3, lux_buffer, strlen(lux_buffer), 1000);
/* May show warning below. Ignore and proceed. */
HAL_UART_Transmit(&huart3, buffer, strlen(buffer), 1000);
HAL_Delay(1000);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @PAram None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief USART3 Initialization Function
* @PAram None
* @retval None
*/
static void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 9600;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @PAram None
* @retval None
*/
static void MX_GPIO_Init(void)
{
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @PAram file: pointer to the source file name
* @PAram line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Solved! Go to Solution.
Labels:
- Labels:
-
I2C
-
STM32F4 Series
-
UART-USART
{kind=link}
{kind=link}
{kind=link}
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-18 05:37 AM - edited 2024-03-18 05:37 AM
There has to be another explanation here. HAL_UART_Transmit can't change the data already in the buffer. Look at the source code to satisfy yourself of that.
If you feel a post has answered your question, please click "Accept as Solution".
3 REPLIES 3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-17 11:33 AM - edited 2024-03-17 11:34 AM
HAL_UART_Transmit can't be at fault here. It doesn't change data within the buffer it's sending out.
Set a breakpoint at HAL_UART_Transmit and look at the data within lux_buffer as well as the value of lux. Probably it reflects lux = 0.
In order to debug, change your code to lux = 42 (or whatever value).
If you feel a post has answered your question, please click "Accept as Solution".
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-18 03:30 AM
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-18 05:37 AM - edited 2024-03-18 05:37 AM
There has to be another explanation here. HAL_UART_Transmit can't change the data already in the buffer. Look at the source code to satisfy yourself of that.
If you feel a post has answered your question, please click "Accept as Solution".
Related Content
- STM32 B-L475E-IOT01A USART1 not working properly transmitting with DMA in STM32CubeIDE (MCUs)
- DMA on STM32L011F4 in STM32 MCUs Embedded software
- DMA RX does not generate an interrupt in STM32 MCUs Products
- STM32 Nucleo F303RE: USART1 DMA not receiving data from GY-25 sensor in STM32CubeIDE (MCUs)
- STM32G0 bootloader usart loop in STM32 MCUs Products