Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- EVSPIN32G4-DUAL Second Motor will not spin
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
EVSPIN32G4-DUAL Second Motor will not spin
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-05-14 10:03 AM
Hello,
I am trying to evaluate the use of MCSDK in a dual-motor application. Motor 1 works, but motor 2 does not.
I have a fresh Workbench project, with both motors configured identically, with the exception of Over-Current Protection. When I generate, I get a "NOTICE: Please disable the overcurrent protection of Stage 2 to avoid resource assignment conflict on COMP2. The power state is already protected by STDRIVE101." Under Current Sensing of Stage 2, I disabled Over-Current Protection, but still get the notice.
The generated CubeIDE project compiles and uploads without issue.
I use MC_FOC_SDK_2_Motors to try to start/stop the motors. After connecting, I hit press Start on Motor 1. I hear the PWM, and after a second (as expected), the motor starts ramping according to my startup sequence. When I press Start on Motor2, I get no sound, and no motion.
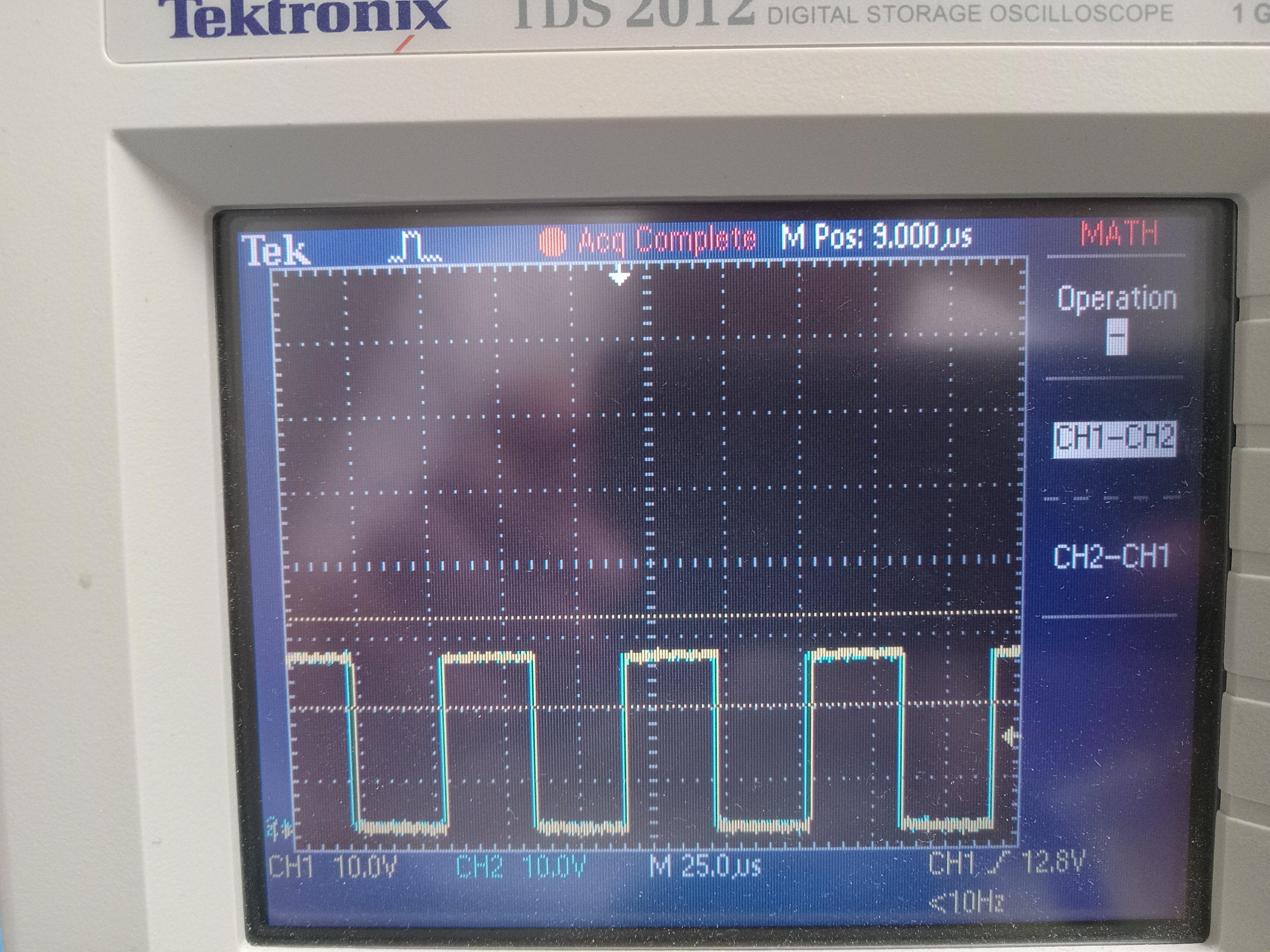
I analyze the outputs to the motor with a dual channel oscilloscope. On Motor 1, U, V, W signals are in phase, with varying pulse width. On Motor2, U, V, W signals are identical in pulse width and phase, which is consistent with no motion and no sound, but I have no idea why it does that.
Solved! Go to Solution.
{kind=link}
{kind=link}
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-05-20 11:10 AM
For any future searchers, I will update with my current situation.
After messing with things for 20 minutes, the problem seems to have gone away. Maybe I was doing something silly. I don't know where the problem came from, but both motors are now running.
2 REPLIES 2
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-05-20 12:36 AM
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-05-20 11:10 AM
For any future searchers, I will update with my current situation.
After messing with things for 20 minutes, the problem seems to have gone away. Maybe I was doing something silly. I don't know where the problem came from, but both motors are now running.
Related Content
- No PWM of fet gates with STM32G431RBT6 motor controller in STM32 MCUs Motor control
- FOC steps in code in NUCLEO-IHM07M1 in STM32 MCUs Motor control
- Does Motor Control Workbench support High-Frequency Injection (HFI)? in STM32 MCUs Motor control
- Troubleshooting of STEVAL-IHM028V2 in STM32 MCUs Motor control
- Over-Voltage Protection Options - Motor Braking Resistor Output No Longer Available In MC Workbench in STM32 MCUs Motor control