Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- Product forums
- Others: hardware and software
- Space Vector Modulation Request for assistance reg...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Space Vector Modulation Request for assistance regarding
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-12-13 05:21 AM - last edited on 2024-12-13 05:36 AM by SofLit
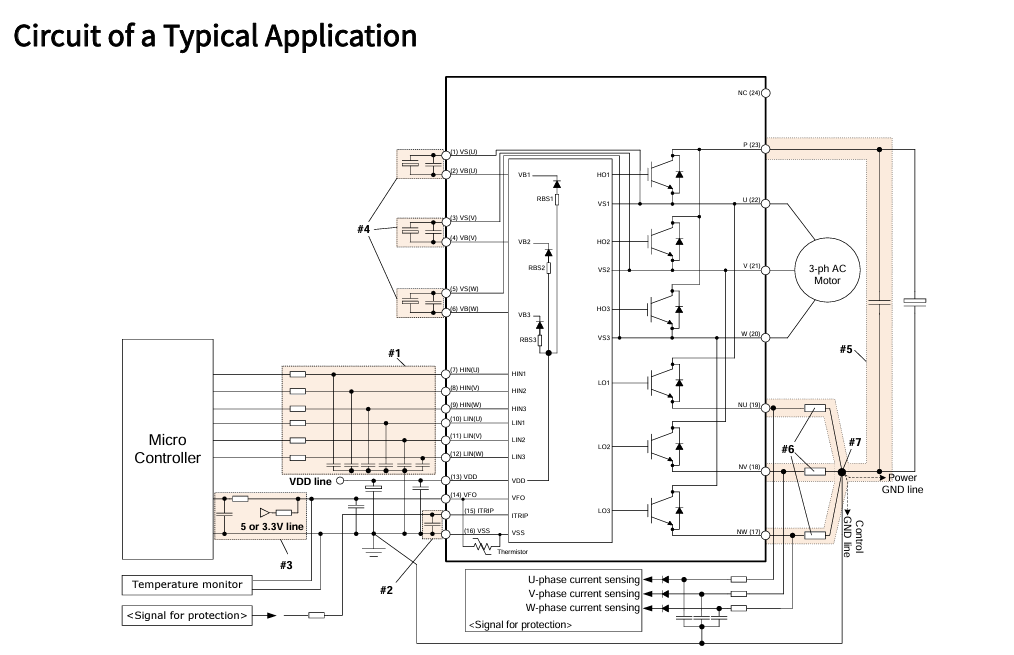
First of all, thank you all in advance, I am trying to control IKCM15L60GA IPM with Stm32f429.
I have added the circuit diagram below, my problem is that when I start the 250 W asynchronous motor drive process that I connected to the IPM output, it vibrates and remains fixed as if it is braked, it does not turn.
I will add the logic analyzer samples and other details as a file.
PLEASE HELP.
Labels:
- Labels:
-
Other hardware
{kind=link}
{kind=link}
3 REPLIES 3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-12-13 05:22 AM - last edited on 2024-12-13 05:36 AM by SofLit
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include <math.h>
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define TIMER_PERIOD 35999 // 5 kHz PWM için
#define SQRT3 1.73205080757
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
void SVM_Update(float Vd, float Vq);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void SVM_Update(float Vd, float Vq)
{
float T1, T2, T0;
float Va, Vb, Vc;
float sector;
// Üç faz referans gerilimlerini hesapla
Va = Vd;
Vb = -0.5 * Vd + SQRT3 / 2 * Vq;
Vc = -0.5 * Vd - SQRT3 / 2 * Vq;
// Sektör belirleme
if (Va >= 0 && Vb >= 0)
sector = 1;
else if (Vb >= 0 && Vc >= 0)
sector = 2;
else if (Vc >= 0 && Va >= 0)
sector = 3;
else if (Va < 0 && Vb < 0)
sector = 4;
else if (Vb < 0 && Vc < 0)
sector = 5;
else
sector = 6;
// Aktif ve sıfır vektör sürelerini hesapla
T1 = TIMER_PERIOD * fabs(sin(sector * M_PI / 3));
T2 = TIMER_PERIOD * fabs(sin((1.0 / 3.0 - sector) * M_PI));
T0 = TIMER_PERIOD - (T1 + T2);
// CCR değerlerini hesapla
uint32_t CCR1 = (uint32_t)((T0 / 2.0 + T1) / TIMER_PERIOD * TIMER_PERIOD);
uint32_t CCR2 = (uint32_t)((T0 / 2.0 + T2) / TIMER_PERIOD * TIMER_PERIOD);
uint32_t CCR3 = (uint32_t)((T0 / 2.0) / TIMER_PERIOD * TIMER_PERIOD);
// Timer 1 PWM kanallarını güncelle
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, CCR1);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, CCR2);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_3, CCR3);
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM1)
{
static float angle = 0.0;
float Vd = 0.8 * cos(angle);
float Vq = 0.8 * sin(angle);
angle += (2 * M_PI * 40 / 5000); // 50 Hz motor frekansı, 5 kHz taşıyıcı frekansı
if (angle > 2 * M_PI)
angle -= 2 * M_PI;
SVM_Update(Vd, Vq);
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM1_Init();
// PWM çıkışlarını başlat
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_2);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_3);
// Timer interrupt başlat
HAL_TIM_Base_Start_IT(&htim1);
while (1)
{
// Ana döngü kullanılmıyor, tüm işlemler kesmelerle yapılır
}
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 180;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
Error_Handler();
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
Error_Handler();
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|
RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
Error_Handler();
}
/**
* @brief TIM1 Initialization Function
* @retval None
*/
static void MX_TIM1_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_CENTERALIGNED1;
htim1.Init.Period = TIMER_PERIOD;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
HAL_TIM_Base_Init(&htim1);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig);
HAL_TIM_PWM_Init(&htim1);
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_2);
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_3);
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 5;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig);
HAL_TIM_MspPostInit(&htim1);
}
/**
* @brief GPIO Initialization Function
* @PAram None
* @retval None
*/
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
} Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-12-13 05:38 AM - edited 2024-12-13 05:38 AM
Hello @Sözde.11 ,
In next time please use </> button to paste your code: https://community.st.com/t5/community-guidelines/how-to-insert-source-code/ta-p/693413
I've edited your post to be inline with the community rules.
Thank you.
To give better visibility on the answered topics, please click on "Accept as Solution" on the reply which solved your issue or answered your question.
PS:
1 - This is NOT an online support (https://ols.st.com) but a collaborative space.
2 - Please be polite in your reply. Otherwise, it will be reported as inappropriate and you will be permanently blacklisted from my help.
PS:
1 - This is NOT an online support (https://ols.st.com) but a collaborative space.
2 - Please be polite in your reply. Otherwise, it will be reported as inappropriate and you will be permanently blacklisted from my help.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-12-13 05:39 AM
Hi, I didn't know it was like this, thank you for your help.
Related Content
- STM32CubeIDE Debug config in STM32CubeIDE (MCUs)
- Sometimes, data does not flow on the CAN bus. in STM32 MCUs Products
- When is the ST67W611M1 WiFi module supposed to be available? in Interface and connectivity ICs
- Accelerometer data throughput or retrieval by request on Teseo VIC3 in GNSS positioning
- TOF VL53L1 Calibration Process in Imaging (sensors)