Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- MEMS and sensors
- MEMS (sensors)
- Code Review Request: Integrating MotionFX with ASM...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Code Review Request: Integrating MotionFX with ASM330LHH, LIS2DH12, and LIS3MDL over SPI
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2025-03-06 10:32 AM
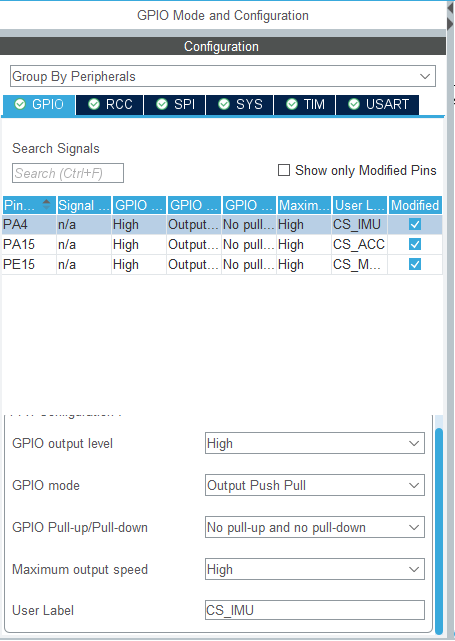
I tried to obtain roll pitch and yaw with the help of motionfx in the x-cube mems1 package by reading data with spi using ASM330LHH, LIS3MDL and LIS2DH12 sensors. I cannot try my code because I do not have the sensors available at the moment. Can you review the code, is there a faulty or missing part? I would appreciate if you can help me. I present the CS pin settings and the project in the attachment
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "motion_fx.h" // MotionFX API definitions (motion_fx.h file provided above)
#include "asm330lhh_reg.h" // ASM330LHH sensor register functions
#include "lis2dh12_reg.h" // LIS2DH12 sensor register functions
#include "lis3mdl_reg.h" // LIS3MDL sensor register functions
#include <stdio.h>
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* Structure that holds the SPI and Chip Select (CS) information for each sensor */
typedef struct {
SPI_HandleTypeDef *hspi;
GPIO_TypeDef *CS_Port;
uint16_t CS_Pin;
} sensor_ctx_t;
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* Set the buffer size for the MotionFX state memory. (Ensure it is large enough) */
#define MFX_STATE_BUFFER_SIZE 256
#define BOOT_TIME 10 // Boot time (in ms)
#define PWM_3V3 915
static uint8_t mfx_state_buffer[MFX_STATE_BUFFER_SIZE];
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* Global sensor context objects */
sensor_ctx_t sensor_ctx_imu; // ASM330LHH (SPI1)
sensor_ctx_t sensor_ctx_acc; // LIS2DH12 (SPI2)
sensor_ctx_t sensor_ctx_mag; // LIS3MDL (SPI3)
/* Sensor device contexts (ST sensor libraries) */
stmdev_ctx_t dev_ctx_imu; // ASM330LHH (gyroscope only)
stmdev_ctx_t dev_ctx_acc; // LIS2DH12 (accelerometer)
stmdev_ctx_t dev_ctx_mag; // LIS3MDL (magnetometer)
uint8_t whoamI, rst;
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi1;
SPI_HandleTypeDef hspi2;
SPI_HandleTypeDef hspi3;
TIM_HandleTypeDef htim3;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_SPI1_Init(void);
static void MX_SPI2_Init(void);
static void MX_SPI3_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len);
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len);
static void tx_com(uint8_t *tx_buffer, uint16_t len);
static void platform_delay(uint32_t ms);
static void platform_init(void);
void Sensors_Init(void);
void read_sensors(float gyro[3], float acc[3], float mag[3]);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_SPI1_Init();
MX_SPI2_Init();
MX_SPI3_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
platform_init(); // Sensor power supply via PWM outputs
/* Transfer SPI and CS information to the sensor contexts */
sensor_ctx_imu.hspi = &hspi1;
sensor_ctx_imu.CS_Port = CS_IMU_GPIO_Port; // ASM330LHH CS port defined in the project
sensor_ctx_imu.CS_Pin = CS_IMU_Pin; // ASM330LHH CS pin defined in the project
sensor_ctx_acc.hspi = &hspi2;
sensor_ctx_acc.CS_Port = CS_ACC_GPIO_Port; // For LIS2DH12
sensor_ctx_acc.CS_Pin = CS_ACC_Pin;
sensor_ctx_mag.hspi = &hspi3;
sensor_ctx_mag.CS_Port = CS_MAG_GPIO_Port; // For LIS3MDL
sensor_ctx_mag.CS_Pin = CS_MAG_Pin;
/* Initialize sensors */
Sensors_Init();
/* Initialize the MotionFX state memory buffer and engine state */
size_t state_size = MotionFX_GetStateSize();
if (state_size > MFX_STATE_BUFFER_SIZE) { Error_Handler(); }
MFXState_t mfx_state = (MFXState_t)mfx_state_buffer;
MotionFX_initialize(mfx_state);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
float raw_gyro[3] = {0}; // ASM330LHH gyroscope data [mdps]
float raw_acc[3] = {0}; // LIS2DH12 accelerometer data [mg]
float raw_mag[3] = {0}; // LIS3MDL magnetometer data [mG]
read_sensors(raw_gyro, raw_acc, raw_mag);
/* Conversions:
- Gyro: mdps -> dps (divide by 1000)
- Acc: mg -> g (divide by 1000)
- Mag: mG -> [uT/50] : (mG * 10 gives microTesla, then divide by 50 = mG * 0.2) */
MFX_input_t mfx_input;
for (int i = 0; i < MFX_NUM_AXES; i++) {
mfx_input.gyro[i] = raw_gyro[i] / 1000.0f; // [dps]
mfx_input.acc[i] = raw_acc[i] / 1000.0f; // [g]
mfx_input.mag[i] = raw_mag[i] * 0.2f; // [uT/50]
}
float dt = 0.01f; // Delta time [sec] (e.g. 10ms)
float q_update = 0.0f; // If needed, we leave it as 0 here
MFX_output_t mfx_output;
/* Run the MotionFX algorithm */
MotionFX_update(mfx_state, &mfx_output, &mfx_input, &dt, &q_update);
/* Note: As a result of the fusion algorithm, MotionFX_update() places the angle values
[yaw, pitch, roll] in the mfx_output.rotation[] array. */
/* Send the result over UART */
char tx_buffer[100];
snprintf(tx_buffer, sizeof(tx_buffer),
"Yaw: %f, Pitch: %f, Roll: %f\r\n",
mfx_output.rotation[0],
mfx_output.rotation[1],
mfx_output.rotation[2]);
tx_com((uint8_t*)tx_buffer, strlen(tx_buffer));
HAL_Delay(10);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 4;
RCC_OscInitStruct.PLL.PLLN = 150;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 3;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI1 Initialization Function
* @PAram None
* @retval None
*/
static void MX_SPI1_Init(void)
{
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
/* SPI1 parameter configuration*/
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi1.Init.CLKPhase = SPI_PHASE_2EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_8;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi1.Init.TIMode = SPI_TIMODE_DISABLE;
hspi1.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi1.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
}
/**
* @brief SPI2 Initialization Function
* @PAram None
* @retval None
*/
static void MX_SPI2_Init(void)
{
/* USER CODE BEGIN SPI2_Init 0 */
/* USER CODE END SPI2_Init 0 */
/* USER CODE BEGIN SPI2_Init 1 */
/* USER CODE END SPI2_Init 1 */
/* SPI2 parameter configuration*/
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi2.Init.CLKPhase = SPI_PHASE_2EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI2_Init 2 */
/* USER CODE END SPI2_Init 2 */
}
/**
* @brief SPI3 Initialization Function
* @PAram None
* @retval None
*/
static void MX_SPI3_Init(void)
{
/* USER CODE BEGIN SPI3_Init 0 */
/* USER CODE END SPI3_Init 0 */
/* USER CODE BEGIN SPI3_Init 1 */
/* USER CODE END SPI3_Init 1 */
/* SPI3 parameter configuration*/
hspi3.Instance = SPI3;
hspi3.Init.Mode = SPI_MODE_MASTER;
hspi3.Init.Direction = SPI_DIRECTION_2LINES;
hspi3.Init.DataSize = SPI_DATASIZE_8BIT;
hspi3.Init.CLKPolarity = SPI_POLARITY_HIGH;
hspi3.Init.CLKPhase = SPI_PHASE_2EDGE;
hspi3.Init.NSS = SPI_NSS_SOFT;
hspi3.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;
hspi3.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi3.Init.TIMode = SPI_TIMODE_DISABLE;
hspi3.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi3.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI3_Init 2 */
/* USER CODE END SPI3_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @PAram None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/**
* @brief USART1 Initialization Function
* @PAram None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @PAram None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, CS_IMU_Pin|CS_ACC_Pin, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(CS_MAG_GPIO_Port, CS_MAG_Pin, GPIO_PIN_SET);
/*Configure GPIO pins : CS_IMU_Pin CS_ACC_Pin */
GPIO_InitStruct.Pin = CS_IMU_Pin|CS_ACC_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : CS_MAG_Pin */
GPIO_InitStruct.Pin = CS_MAG_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(CS_MAG_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* =======================================================================
Sensor Initialization Function
======================================================================= */
void Sensors_Init(void)
{
/* --- ASM330LHH (Gyroscope Only) - SPI1 --- */
dev_ctx_imu.write_reg = platform_write;
dev_ctx_imu.read_reg = platform_read;
dev_ctx_imu.mdelay = platform_delay;
dev_ctx_imu.handle = &sensor_ctx_imu; // ASM330LHH: SPI1 & associated CS
platform_delay(BOOT_TIME);
asm330lhh_device_id_get(&dev_ctx_imu, &whoamI);
if (whoamI != ASM330LHH_ID) { Error_Handler(); }
asm330lhh_reset_set(&dev_ctx_imu, PROPERTY_ENABLE);
do { asm330lhh_reset_get(&dev_ctx_imu, &rst); } while (rst);
asm330lhh_device_conf_set(&dev_ctx_imu, PROPERTY_ENABLE);
asm330lhh_block_data_update_set(&dev_ctx_imu, PROPERTY_ENABLE);
asm330lhh_gy_data_rate_set(&dev_ctx_imu, ASM330LHH_GY_ODR_12Hz5);
asm330lhh_gy_full_scale_set(&dev_ctx_imu, ASM330LHH_2000dps);
/* --- LIS2DH12 (Accelerometer) - SPI2 --- */
dev_ctx_acc.write_reg = platform_write;
dev_ctx_acc.read_reg = platform_read;
dev_ctx_acc.mdelay = platform_delay;
dev_ctx_acc.handle = &sensor_ctx_acc; // LIS2DH12: SPI2 & associated CS
platform_delay(BOOT_TIME);
lis2dh12_device_id_get(&dev_ctx_acc, &whoamI);
if (whoamI != LIS2DH12_ID) { Error_Handler(); }
lis2dh12_block_data_update_set(&dev_ctx_acc, PROPERTY_ENABLE);
lis2dh12_data_rate_set(&dev_ctx_acc, LIS2DH12_ODR_10Hz);
lis2dh12_full_scale_set(&dev_ctx_acc, LIS2DH12_2g);
lis2dh12_temperature_meas_set(&dev_ctx_acc, LIS2DH12_TEMP_ENABLE);
lis2dh12_operating_mode_set(&dev_ctx_acc, LIS2DH12_HR_12bit);
/* --- LIS3MDL (Magnetometer) - SPI3 --- */
dev_ctx_mag.write_reg = platform_write;
dev_ctx_mag.read_reg = platform_read;
dev_ctx_mag.mdelay = platform_delay;
dev_ctx_mag.handle = &sensor_ctx_mag; // LIS3MDL: SPI3 & associated CS
platform_delay(BOOT_TIME);
lis3mdl_device_id_get(&dev_ctx_mag, &whoamI);
if (whoamI != LIS3MDL_ID) { Error_Handler(); }
lis3mdl_reset_set(&dev_ctx_mag, PROPERTY_ENABLE);
do { lis3mdl_reset_get(&dev_ctx_mag, &rst); } while (rst);
lis3mdl_block_data_update_set(&dev_ctx_mag, PROPERTY_ENABLE);
lis3mdl_data_rate_set(&dev_ctx_mag, LIS3MDL_HP_1Hz25);
lis3mdl_full_scale_set(&dev_ctx_mag, LIS3MDL_16_GAUSS);
lis3mdl_temperature_meas_set(&dev_ctx_mag, PROPERTY_ENABLE);
lis3mdl_operating_mode_set(&dev_ctx_mag, LIS3MDL_CONTINUOUS_MODE);
}
/* =======================================================================
Sensor Data Reading Function
======================================================================= */
void read_sensors(float gyro[3], float acc[3], float mag[3])
{
uint8_t flag;
/* --- ASM330LHH (Gyroscope - SPI1) --- */
int16_t raw_gyro[3] = {0};
asm330lhh_gy_flag_data_ready_get(&dev_ctx_imu, &flag);
if (flag)
{
asm330lhh_angular_rate_raw_get(&dev_ctx_imu, raw_gyro);
for (int i = 0; i < 3; i++)
{
gyro[i] = raw_gyro[i]; // mdps; conversion will be done in main()
}
}
/* --- LIS2DH12 (Accelerometer - SPI2) --- */
int16_t raw_acc[3] = {0};
lis2dh12_reg_t lis2dh_flag;
lis2dh12_xl_data_ready_get(&dev_ctx_acc, &lis2dh_flag.byte);
if (lis2dh_flag.byte)
{
lis2dh12_acceleration_raw_get(&dev_ctx_acc, raw_acc);
for (int i = 0; i < 3; i++)
{
acc[i] = raw_acc[i]; // mg; conversion will be done in main()
}
}
/* --- LIS3MDL (Magnetometer - SPI3) --- */
int16_t raw_mag[3] = {0};
uint8_t mag_flag;
lis3mdl_mag_data_ready_get(&dev_ctx_mag, &mag_flag);
if (mag_flag)
{
lis3mdl_magnetic_raw_get(&dev_ctx_mag, raw_mag);
for (int i = 0; i < 3; i++)
{
mag[i] = raw_mag[i]; // mG; conversion will be done in main()
}
}
}
/* =======================================================================
Platform Dependent Functions
======================================================================= */
static int32_t platform_write(void *handle, uint8_t reg, const uint8_t *bufp, uint16_t len)
{
sensor_ctx_t *ctx = (sensor_ctx_t *)handle;
HAL_GPIO_WritePin(ctx->CS_Port, ctx->CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(ctx->hspi, ®, 1, 1000);
HAL_SPI_Transmit(ctx->hspi, (uint8_t*)bufp, len, 1000);
HAL_GPIO_WritePin(ctx->CS_Port, ctx->CS_Pin, GPIO_PIN_SET);
return 0;
}
static int32_t platform_read(void *handle, uint8_t reg, uint8_t *bufp, uint16_t len)
{
sensor_ctx_t *ctx = (sensor_ctx_t *)handle;
reg |= 0x80;
HAL_GPIO_WritePin(ctx->CS_Port, ctx->CS_Pin, GPIO_PIN_RESET);
HAL_SPI_Transmit(ctx->hspi, ®, 1, 1000);
HAL_SPI_Receive(ctx->hspi, bufp, len, 1000);
HAL_GPIO_WritePin(ctx->CS_Port, ctx->CS_Pin, GPIO_PIN_SET);
return 0;
}
static void tx_com(uint8_t *tx_buffer, uint16_t len)
{
HAL_UART_Transmit(&huart1, tx_buffer, len, 1000);
}
static void platform_delay(uint32_t ms)
{
HAL_Delay(ms);
}
/* For PWM outputs and sensor power supply */
static void platform_init(void)
{
TIM3->CCR1 = PWM_3V3;
TIM3->CCR2 = PWM_3V3;
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_Delay(1000);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @PAram file: pointer to the source file name
* @PAram line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Labels:
{kind=link}
{kind=link}
1 REPLY 1
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2025-03-06 10:59 AM
I wanna learn to answer for this question !