Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- Re: What's the maximum eRPM supported by B-G431B-E...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
What's the maximum eRPM supported by B-G431B-ESC1 dev board?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-08-04 10:29 AM
Hello,
I'm having difficulty in reaching the maximum RPM specified by my battery and motor combination using the B-G431B-ESC1 dev board.
I'd expect about 10,000 RPM with a full battery but am only able to achieve ~4000 before getting a speed feedback fault. I'm using an 11 pole-pair motor rated 480KV at 21V (5S Samsung 18650 25R cells). I've used an LCR meter to measure the motor characteristics and have input them into the motor control workbench. I've had to manually adjust PID Gains in the advanced tab in order to get a successful startup as the motor profiler simply has not worked with my configuration. When I manually ramp up the speed, regardless of how quickly (1s ramp or 10s ramp), it'll cut out and report a speed feedback fault at ~3800 to 4200 RPM. This works out to around 42k to 46k eRPM that it trips at. Currently this motor is just sitting on my bench, no-load. I've commented out the "ESC applicaton" calls from main.c as the "waiting for signal beeps" were interrupting the startup routines. I'm able to spin the motor at will from about 250 to 4000 RPM, as long as I don't let the RPM over or under shoot the target too much.
I've tried playing with:
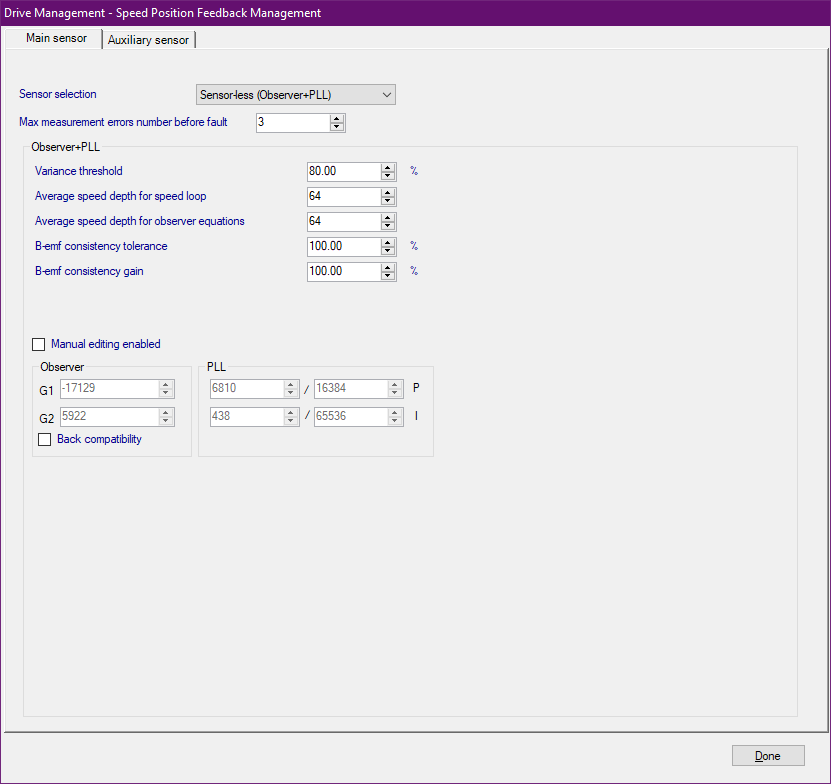
1) Observer C2 (dividing by 2, 4, 6, and 8 as suggested by the PMSM FOC SDK FAQ document)
2) Switching frequency from 20kHz to 30kHz
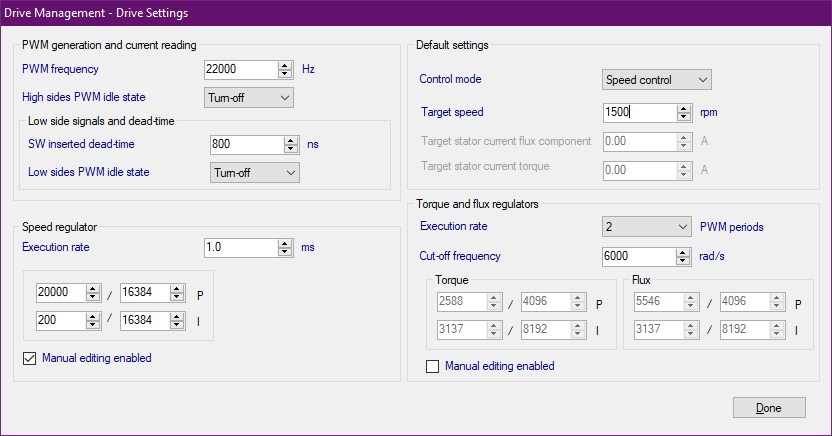
3) Torque and Flux regulator Execution Rate from 2 to 5 PWM Periods (1 trips a software fault) and 2000-6000 rad/s cut-off frequency.
4) Speed Regulator Execution Rate: 0.5 to 1.0 ms.
5) Supply voltage: Tested on both 3S and 5S Lithium (11V and 20V) with same speed limit.
What am I doing wrong? Am I at a hardware limit for processing power? I've attached photos of the settings that seem to work best with this motor.
Thank you
Solved! Go to Solution.
Labels:
- Labels:
-
STM32 Motor Control
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-08-09 04:24 PM
You're not at the limit of processing power. I routinely run up to 17000rpm on a 6pp motor with f303, which has like half the processing power.
i note your 6000rads-1 value is actually only 950hz, so 57kerpm so 5211 motor rpm. Could that be the problem? If not, maybe it'll be your next problem.
I found it was much less flakey in torque control mode. I also found it has a habit of getting somewhat tangled up in itself and starting from scratch and going through it methodically can be a lot more fruitful.
4 REPLIES 4
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-08-09 04:24 PM
You're not at the limit of processing power. I routinely run up to 17000rpm on a 6pp motor with f303, which has like half the processing power.
i note your 6000rads-1 value is actually only 950hz, so 57kerpm so 5211 motor rpm. Could that be the problem? If not, maybe it'll be your next problem.
I found it was much less flakey in torque control mode. I also found it has a habit of getting somewhat tangled up in itself and starting from scratch and going through it methodically can be a lot more fruitful.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-10-06 12:41 AM
Dear @EMuel.1
It the @DMolo 's answer solve your issue?
Best regards
Laurent Ca...
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2021-04-09 04:59 PM
Hello,
I think I'm having the same problem of EMuel.1. I'm using a 7 poles 1000Kv (Protonik DM2810-1000). The profiler work good at different currents, but when I build custom projects I can't reach the same rpm found by the profiler (around 8000 rpm). In my code I generate a ramp of 7000 rpm in 4 seconds. The start-up phase it's OK, but then the motor increasing speed stop around 6666 rpm and give a feedback fault.
I'm still trying to understand what parameter to change to reach the max rpm.
I'll continue to search for a solution...
Thanks
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2021-04-21 10:35 AM
Well, I solved my problems in two steps!
My configuration is:
- B-G431B-ESC1
- 7 pole motor of 1000KV (Protronik DM2810-1000), rated for about 9800 RMP at 12V, 26.6A with a propeller 10x5
- 3 cells LIPO battery
First of all, I had to increase the Current Threshold in the Analog Input and Protection window. This to avoid Over Current and Speed Feedback faults.
After that I could spin my motor at about 8400 RPM.
Second, I decreased the PWM frequency from 30KHz to 20KHz.
After that I could spin my motor over 10000 RMP that is the same RPM I can reach with a commercial ESC.
I still need to ensure that the current doesn't overcame 30A to work safe, but at first touch it doesn't seem couse I dont feel the ESC so warm.
Related Content
- MotorControl Workbench Issues in STM32 MCUs Motor control
- USB UVC with STM32U5G9ZJT6Q is 60 MHZ PHY Clock possible in STM32 MCUs Products
- Maximum supported resolution for the STM32U5G9? in STM32 MCUs Products
- ST UCPD Problem with capabiltity mismatch in STM32 MCUs Embedded software
- Motor profiler 1.2.9 unable to spin motor in STM32 MCUs Motor control