Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- Re: Effect of Duration on Encoder Alignment
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Effect of Duration on Encoder Alignment
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-06-10 1:06 PM - edited 2024-06-10 1:08 PM
Hello!
We are currently using the STSPIN32G4 microcontroller for our project, which incorporates a quadrature encoder.
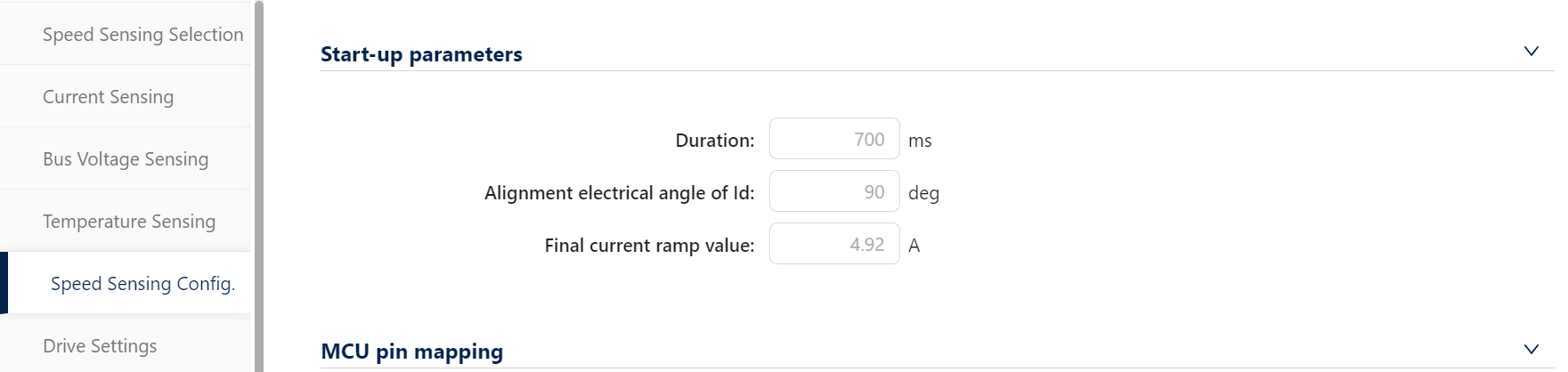
In the start-up parameters, there are three key settings: Duration, Alignment Electrical Angle of Id, and Final Current Ramp value. We have determined the encoder alignment angle using the current waveform procedure.
Could you explain how altering the default values of Duration and Final Current Ramp will affect the system? Specifically, we are interested in understanding how these changes might impact the displacement of the rotor shaft during the encoder alignment process, and whether setting a shorter duration could be disadvantageous.
Labels:
- Labels:
-
MC Workbench
-
STM32 Motor Control
2 REPLIES 2
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-06-17 8:41 AM
Posting the answer here for future reference:
Could you explain how altering the default values of Duration and Final Current Ramp will affect the system?
The duration is the time (t) and final current ramp is the current at t.
Prior to alignment, the rotor position is unknown.
A and B signals can only give a relative change in angle/speed and not absolute values. So, we will need some alignment (either manual or automated)
The automated method used to align the rotor is to set a Iq ramp for a fixed duration t. The alignment is considered complete once the Z signal interrupt is received by the controller.

{kind=link}
Specifically, we are interested in understanding how these changes might impact the displacement of the rotor shaft during the encoder alignment process, and whether setting a shorter duration could be disadvantageous.
It depends on the load torque applied to the motor shaft during startup. If the motor is loaded, you’d want to have a larger Final Current value, so the shaft rotates enough to complete the encoder alignment. The duration parameter (t) can be steeper based on the rate of change of torque that is realistic for the shaft load-coupler.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-06-25 8:53 PM
How to get encoder alignment angle using current waveform. can you let me know
Related Content
- STSPINF0251 Not spinning BLDC motor in STM32 MCUs Motor control
- Incremental Encoder Alignment Problem in STM32 MCUs Motor control
- B-G431B-ESC1 overcurrent issue when using quadrature encoder in STM32 MCUs Motor control
- G070KBT6 - HAL_UART_Receive function return HAL_TIMEOUT early. in STM32 MCUs Products
- MCSDK 6.3.1 is out ! in STM32 MCUs Motor control