Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- MEMS and sensors
- Imaging (sensors)
- Re: VL6180X -- Unstable inter-measurement period i...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
VL6180X -- Unstable inter-measurement period in continuous mode
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-11-22 10:00 AM
Hi everyone,
I am facing a problem where my VL6180X hangs indefinitely until reset after a seemingly random period of time. The sensor runs in continuous mode and samples at 100 Hz (thanks to this post).
I configure the sensor by setting the SYSRANGE_INTERMEASUREMENT_PERIOD and READOUT_AVERAGING_SAMPLE_PERIOD registers (see code example). The SYSRANGE_INTERMEASUREMENT_PERIOD seems to be where the problem lies. If I set this register to 0x0, then the sensor will eventually hang. If I set it to 0x1, the sensor will not hang, but my sampling frequency will be significantly reduced. However, the datasheet states that [0-254] is the acceptable range of values for this register (see datasheet image); so, 0x0 shouldn't be a problem.
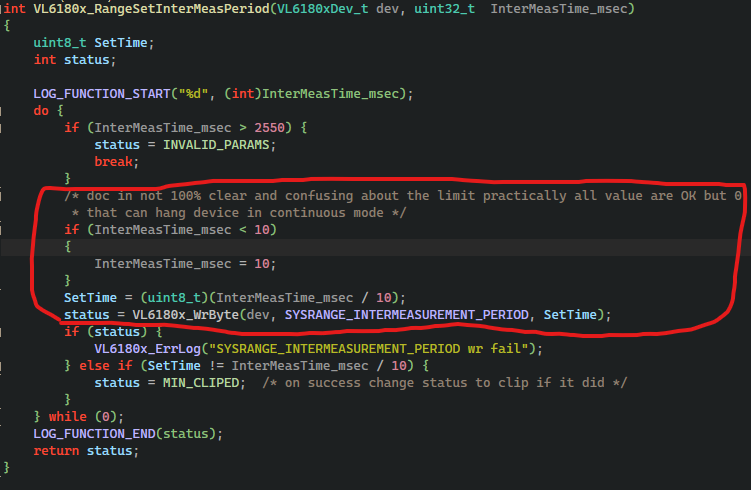
Additionally, matters become more confusing when you look at the VL6180X API (see code screenshot). The input variable `InterMeasTime_msec` is bounded to at least 10 milliseconds. This means that `SetTime`, and therefore the inter-measurement register, will always be at least 1. The code comment (not written by me) in that screenshot points out that the "hanging" is a known issue.
So, is the datasheet wrong? Can the SYSRANGE_INTERMEASUREMENT_PERIOD only handle [1-254]? Or, am I missing something in my setup?
While I can handle the "hanging" as an error and reset the VL6, I'd rather not have sensor the down time be an acceptable component of my system.
Thank you for reading this post! I would greatly appreciate any help on this. :)
VL6180x_WrByte(vl6I2C, SYSRANGE_INTERMEASUREMENT_PERIOD, 0x0); // Set intermeasurement period to 10 ms
VL6180x_WrByte(vl6I2C, READOUT_AVERAGING_SAMPLE_PERIOD, 0x18); // Cut the recommended averaging time in half
Labels:
- Labels:
-
Time of flight
{kind=link}
{kind=link}
3 REPLIES 3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-11-22 10:22 AM
The VL6180 works differently from our other sensors. It collects photons until it has enough and then returns an answer. (The other sensors use as much time as you allow.)
So if one is looking at a bright target it won't take long, but if one is looking at a dull target it might take up to 10ms to get an answer.
The intermeasurement period was an attempt to slow the senor down and get results in a more even clock.
I would try an experiment - simply don't set the IM. See if that works for you.
And I do like your reduction of the averaging period.
- john
If this or any post solves your issue, please mark them as 'Accept as Solution' It really helps. And if you notice anything wrong do not hesitate to 'Report Inappropriate Content'. Someone will review it.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-11-22 12:53 PM
Thanks for the insight, John!
So, to check my understanding, does the VL6180 hang if the intermeasurement period expires before the sensor can collect enough photons to perform a measurement?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-11-22 4:32 PM
Kurt -
The sensor should never hang. But clearly someone noticed it did and provided a work-around.
If you have a 10ms timing budget the sensor will return after 10ms - and if it did not get enough photons, you will get a 'no target' status return. If it gets lots of photons, it might return a distance in 5ms.
and then immediately start another range.
The setting of the intermeasurement period was to say - don't start again until after 10ms since the last start.
But somehow there is a hole - and you say it hangs.
At this point we are just looking to find solutions to the hang.
Keep in mind that the hang might also occur if there is a glitch on the XShut line. Make sure that line is well protected from noise.
If this or any post solves your issue, please mark them as 'Accept as Solution' It really helps. And if you notice anything wrong do not hesitate to 'Report Inappropriate Content'. Someone will review it.