Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs Software development tools
- STM32CubeIDE (MCUs)
- Re: SPI Not communicating with aurdino
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
SPI Not communicating with aurdino
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-25 11:07 AM
So , I wrote all driver my self so dont know how to ask this but i can provide you with few code.
This is main.c file and other driver file is attached below........
#include <string.h>
#include "stm3f407xx.h"
void delay(void){
for(uint32_t i =0;i<500000/2;i++);
}
/*
* PB 12 --> NSS
* PB 13 --> SCLK
* PB 14 --> MISO
* PB 15 --> MOSI
*
* */
void SPI2_GPIOInint(void)
{
GPIO_Handle_t SPI_Pins;
SPI_Pins.pGPIOx = GPIOB;
SPI_Pins.GPIO_PinConfig.GPIO_PinMode = GPIO_MODE_ATLFN;
SPI_Pins.GPIO_PinConfig.GPIO_PinAFMode = 5;
SPI_Pins.GPIO_PinConfig.GPIO_PinOType = GPIO_OP_TYPE_PP;
SPI_Pins.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_NO_PUPD;
SPI_Pins.GPIO_PinConfig.GPIO_PinSpeed = GPIO_OP_SPEED_HI;
// SCLK
SPI_Pins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_13;
GPIO_Init(&SPI_Pins);
// MISO
//SPI_Pins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_14;
//GPIO_Init(&SPI_Pins);
// MOSI
SPI_Pins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_15;
GPIO_Init(&SPI_Pins);
//NSS
SPI_Pins.pGPIOx = GPIOB;
SPI_Pins.GPIO_PinConfig.GPIO_PinMode = GPIO_MODE_OUT;
SPI_Pins.GPIO_PinConfig.GPIO_PinOType = GPIO_OP_TYPE_PP;
SPI_Pins.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_NO_PUPD;
SPI_Pins.GPIO_PinConfig.GPIO_PinSpeed = GPIO_OP_SPEED_MED;
SPI_Pins.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_12;
GPIO_Init(&SPI_Pins);
}
void SPI2_Inint(void)
{
SPI_Handle_t SPI_Handle;
SPI_Handle.pSPIx = SPI2;
SPI_Handle.SPIConfig.SPI_BusConfig = SPI_BUS_CONFIG_FD;
SPI_Handle.SPIConfig.SPI_DeviceMode = SPI_DEVICE_MODE_MASTER;
SPI_Handle.SPIConfig.SPI_SclkSpeed = SPI_SCLK_SPEED_DIV32; // to provide 2MHz clock
SPI_Handle.SPIConfig.SPI_SSM = SPI_SSM_DI; // Software slave management mode as we dont actually need NSS
SPI_Handle.SPIConfig.SPI_DFF = SPI_DFF_8BITS;
SPI_Handle.SPIConfig.SPI_CPHA = SPI_CPHA_LOW;
SPI_Handle.SPIConfig.SPI_CPOL = SPI_CPOL_LOW;
SPI_Init(&SPI_Handle);
}
/* FOR BUTTON */
void GPIO_Buttoninit()
{
GPIO_Handle_t Gpiobut;
Gpiobut.pGPIOx = GPIOA;
Gpiobut.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_0;
Gpiobut.GPIO_PinConfig.GPIO_PinMode = GPIO_MODE_IN;
Gpiobut.GPIO_PinConfig.GPIO_PinSpeed = GPIO_OP_SPEED_HI;
// Gpiobut.GPIO_PinConfig.GPIO_PinOType = GPIO_OP_TYPE_PP;
Gpiobut.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_NO_PUPD;
// GPIO_PeriClockControl(GPIOA,ENABLE); NO NEED AS WE ARE ENABLING IN INIT FUNCTION
GPIO_Init(&Gpiobut);
}
void GPIO_Led()
{
GPIO_Handle_t Gpioled;
Gpioled.pGPIOx = GPIOD;
Gpioled.GPIO_PinConfig.GPIO_PinNumber = GPIO_PIN_NO_12;
Gpioled.GPIO_PinConfig.GPIO_PinMode = GPIO_MODE_OUT;
Gpioled.GPIO_PinConfig.GPIO_PinSpeed = GPIO_OP_SPEED_HI;
Gpioled.GPIO_PinConfig.GPIO_PinOType = GPIO_OP_TYPE_PP;
Gpioled.GPIO_PinConfig.GPIO_PinPuPdControl = GPIO_NO_PUPD;
// GPIO_PeriClockControl(GPIOD,ENABLE);
GPIO_Init(&Gpioled);
}
int main(void)
{
char Userdata[] = "Hello World";
// Enable GPIOB
SPI2_GPIOInint();
GPIO_WriteToOutputPin(GPIOB, GPIO_PIN_NO_12, SET);
// Enable SPI2
SPI2_Inint();
GPIO_Buttoninit();
GPIO_Led();
GPIO_WriteToOutputPin(GPIOD, GPIO_PIN_NO_12, SET);
// This will enable SSI and make NSS High internally and avoid MODF Error
// SPI_SSIConfig(SPI2,ENABLE);
SPI_SSOEConfig(SPI2,ENABLE);
while(1){
// if(GPIO_ReadFromInputPin(GPIOA, GPIO_PIN_NO_0) == ENABLE){
// delay(); // To avoid pin bouncing
// GPIO_ToggleOutputPin(GPIOD,GPIO_PIN_NO_12);
// }
while(!GPIO_ReadFromInputPin(GPIOA,GPIO_PIN_NO_0));
delay();
// Enable SPI in CR1 register
SPI_PeripheralControl(SPI2,ENABLE);
// Slave need to know LENGTH INFO (1BYTE)
uint8_t datalen = strlen(Userdata);
GPIO_WriteToOutputPin(GPIOB, GPIO_PIN_NO_12, RESET);
GPIO_WriteToOutputPin(GPIOD, GPIO_PIN_NO_12, RESET);
SPI_SendData(SPI2,&datalen,1);
SPI_SendData(SPI2,(uint8_t*)Userdata,strlen(Userdata));
// Cannot disable abruptly
// So check if SPI is busy or not using STATUS REGISTER
while(SPI_GetFlagStatus(SPI2,SPI_BUSY_FLAG));
SPI_PeripheralControl(SPI2,DISABLE);
GPIO_WriteToOutputPin(GPIOB, GPIO_PIN_NO_12, SET);
GPIO_WriteToOutputPin(GPIOD, GPIO_PIN_NO_12, SET);
}
return 0;
}
Solved! Go to Solution.
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 07:53 AM
It would take me quite a lot of time to dig into the code and understand it, let alone figure out what may be the problem. I'm not sure I have that sort of time to devote, so I will provide some general advice instead:
- Developing new drivers can be a good learning experience, but learning to use what is already there is useful as well. Especially if it's generally adopted by a large portion of the community. It's unlikely your employer will ask you to remake HAL. Perhaps they may ask you to make it faster.
- I can see more benefit in accessing registers directly rather than making HAL-like functions. The reference manual will be a good source of information.
> So while debuggging First while loop so it works fine , it loops back as expected then i checked for register values and they do seem fine
Respectfully, this is still more non-information. If everything looks fine, then what is the problem? Are the signals coming out of the SPI correct? If not, how are they incorrect? I don't want to dig through 10 pictures in order to try to guess and find what the problem.
If you're very stuck, I would recommend getting some HAL SPI examples to run and comparing your register values between that working code and your own, in order to narrow down on the problem.
If you feel a post has answered your question, please click "Accept as Solution".
7 REPLIES 7
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-25 12:13 PM
Why redo functions that HAL already created? Going to be quite a bit of work and won't be very portable.
Can you provide more to go off of than just saying it isn't communicating? Have you done any debugging or verification at all?
If you feel a post has answered your question, please click "Accept as Solution".
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 04:38 AM - edited 2023-10-26 04:43 AM
Yes I am aware that HAL created functions for tis task but its part of what i was learning, i was learning to write Whole drivers from scratch.
"Can you provide more to go off of than just saying it isn't communicating? Have you done any debugging or verification at all?"
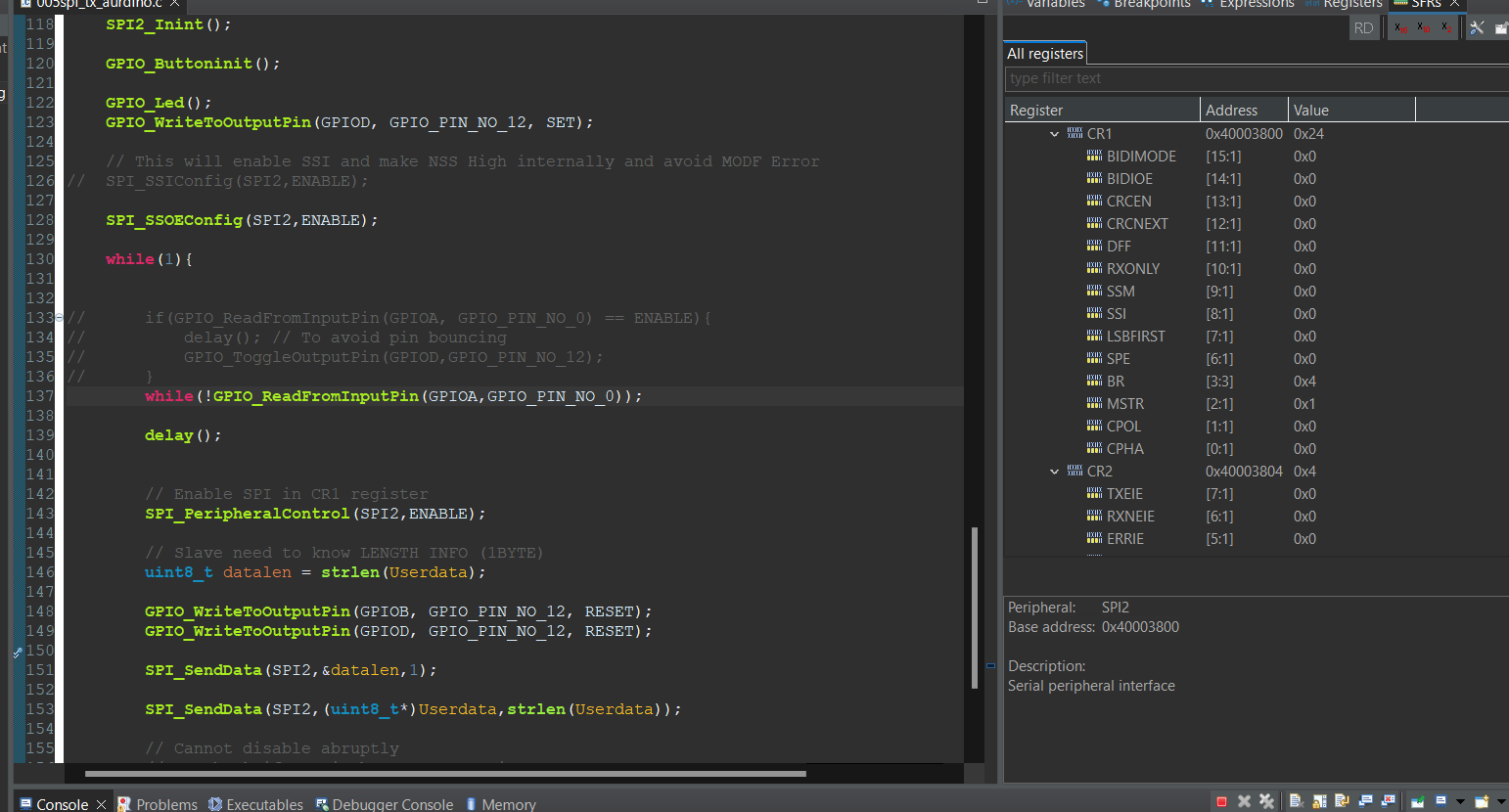
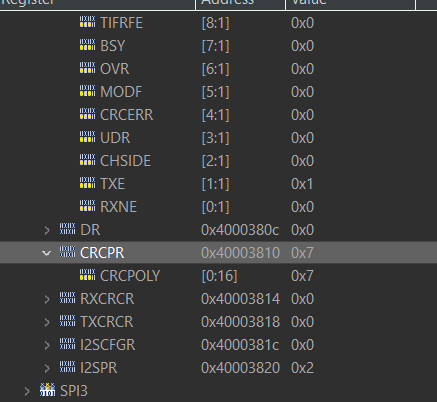
Yes So I have done a lot of debugging and searching on communities for solution but didnt find any, So while debuggging First while loop so it works fine , it loops back as expected then i checked for register values and they do seem fine, i will attach values if you want.
{kind=link}
{kind=link}
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 04:39 AM
{kind=link}
{kind=link}
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 04:40 AM
{kind=link}
{kind=link}
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 04:41 AM
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 07:53 AM
It would take me quite a lot of time to dig into the code and understand it, let alone figure out what may be the problem. I'm not sure I have that sort of time to devote, so I will provide some general advice instead:
- Developing new drivers can be a good learning experience, but learning to use what is already there is useful as well. Especially if it's generally adopted by a large portion of the community. It's unlikely your employer will ask you to remake HAL. Perhaps they may ask you to make it faster.
- I can see more benefit in accessing registers directly rather than making HAL-like functions. The reference manual will be a good source of information.
> So while debuggging First while loop so it works fine , it loops back as expected then i checked for register values and they do seem fine
Respectfully, this is still more non-information. If everything looks fine, then what is the problem? Are the signals coming out of the SPI correct? If not, how are they incorrect? I don't want to dig through 10 pictures in order to try to guess and find what the problem.
If you're very stuck, I would recommend getting some HAL SPI examples to run and comparing your register values between that working code and your own, in order to narrow down on the problem.
If you feel a post has answered your question, please click "Accept as Solution".
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-10-26 07:34 PM
Okay thank you I think I will try with hal and compare to see what's wrong on my side.
Related Content
- Enabling peripherals for SPI communication in seongji LSM110A project in STM32CubeIDE (MCUs)
- Cannot communicate woth STM32 chip via simple USB cable on my Windows 10 PC in STM32CubeIDE (MCUs)
- How to Use a Variable in SRAM to Communicate between Bootloader and Application in STM32CubeIDE (MCUs)
- NRF24 communication between Stm32g431RB and raspberry pi 4 in STM32CubeIDE (MCUs)
- Ethernet Based Application in H755ZI-Q board using LwIP -TCP communication particularly for RMII support in STM32CubeIDE (MCUs)