Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- Why I_Q_MEAS is zero when motor is locked and I_Q_...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Why I_Q_MEAS is zero when motor is locked and I_Q_REF goes up to the maximum value?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-03-31 3:04 AM - edited 2024-03-31 6:34 PM
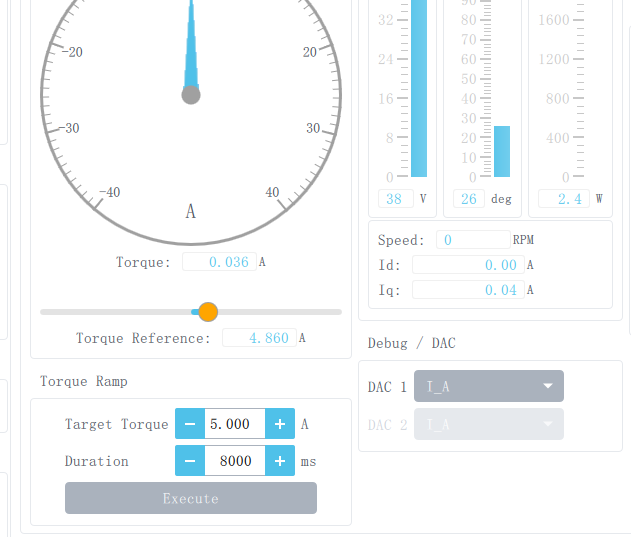
I'm using ST workbench 6.2.0 and motor Pilot V1.2.4. NUCLEO+ IHM08M1, three shunt sensor and brushless motor with encoder.
When the motor is blocked, using TORQUE control-->Torque Ramp in Motor Pilot, the actual drive current I_Q_MEAS is almost zero, although the Torque_Reference and I_Q_REF is shown to reach the expected value.
Once the motor is unblocked, everything seems to be fine.
It seems to me that since the actual Iq is almost zero, the drive isn't capable of delivering maximum starting torque.
What am I missing here?
Solved! Go to Solution.
{kind=link}
{kind=link}
{kind=link}
This discussion is locked. Please start a new topic to ask your question.
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-03 1:00 AM
Hello PQ,
Please correct me if I am wrong : you are trying to start your motor with a resistive torque applied.
In that case, it looks like an alignment issue. As you may know, an encoder needs to be aligned correctly before start-up, if you don't or if you can't (for example because your rotor is locked) then your encoder is incorrectly initialized and you will have trouble starting your motor. You may solve your issue by increasing the Final Current Ramp Value (Speed Sensing Config tab in the MC WorkBench) of your start-up parameters to force alignement and then ensure a proper start-up.
If you agree with my answer, please consider accepting it by clicking on 'Accept as solution'.
Hope this will help,
Gaël A.
Hope this will help,
Gaël A.
1 REPLY 1
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-03 1:00 AM
Hello PQ,
Please correct me if I am wrong : you are trying to start your motor with a resistive torque applied.
In that case, it looks like an alignment issue. As you may know, an encoder needs to be aligned correctly before start-up, if you don't or if you can't (for example because your rotor is locked) then your encoder is incorrectly initialized and you will have trouble starting your motor. You may solve your issue by increasing the Final Current Ramp Value (Speed Sensing Config tab in the MC WorkBench) of your start-up parameters to force alignement and then ensure a proper start-up.
If you agree with my answer, please consider accepting it by clicking on 'Accept as solution'.
Hope this will help,
Gaël A.
Hope this will help,
Gaël A.
Related Content
- First motor start fails with SPEED_FEEDBACK fault, second start works in STM32 MCUs Motor control
- B-G431B-ESC1: Encoder-Based Speed Control Failure in STM32 MCUs Motor control
- Vibration Occurring While PMSM Motor Is in Standstill. in STM32 MCUs Motor control
- No Holding Torque with FOC + Current Loop Appears Unresponsive in STM32 MCUs Motor control
- Missing sample points with MC Control Pilot Scope in STM32 MCUs Motor control