Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- Motor stops when counter load has applied at MC Wo...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Motor stops when counter load has applied at MC Workbench
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-23 5:30 AM
Hello there,
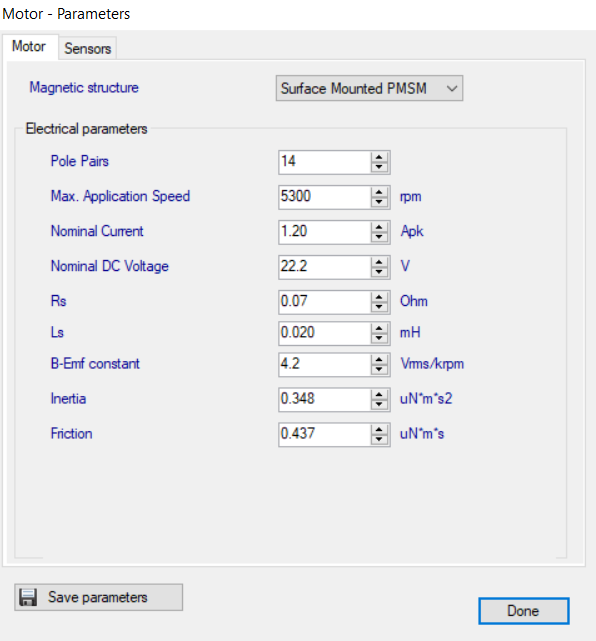
I have sensorless 3-phase bldc motor. I am using MC Workbench for Sensorless FOC algorithm with STEVAL-SPIN3201 board. I've run my motor at torque mode and it seems okay. But, when I loaded motor does not produce any torque and immediately stops. What can be the problem? I've attached screenshots of GUI settings file.





Solved! Go to Solution.
Labels:
- Labels:
-
STM32 Motor Control
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
This discussion is locked. Please start a new topic to ask your question.
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-25 9:56 PM
Hello There,
I've solved the problem. It was all about Iq reference value. I've increased the value and my motor has produced more torque to counter load.
Thank you for your help @Fred V..
Best Regards...
5 REPLIES 5
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-24 3:19 AM
Hello,
The problem can be that the load you apply is too high for the motor to spin. In this situation, the sensorless algorithm cannot operate. Indeed, the sensorless alrorithm relies on an estimation of the back electromotive force of the motor. This Back-EMF is proportional to the rotation speed of the motor. If the rotation speed is too low, the estimated Back-EMF is not reliable enough for the sensorless algorithm to work well. And if the load applied to the shaft of the motor is too high, the motor will not be able to spin fast enough.
Now, things are usually neither black or white. I suppose that the error you get when you load the motor is a Startup Error. Then, the questions are:
- how long does it take for the system to declare a Startup Error fault? My guess would be that it fails after approx. 4.333... seconds. If it fails sensibly before that, you probably have an issue with your hardware setup (maybe the power supply is not big enough?).
- Is the motor moving, even just a little, before the Startup Error fault is triggered? If no, your load is most probably way too high. If yes, you may try either of the following:
- increase the "minimum startup output speed"
- lengthen the startup phase by a few seconds. You can either lengthen phase two or use phase 3 by setting its duration parameter to 1 or 2 seconds.
If you get another error, like an undervoltage error, then, I would first tend to blame your power supply. You can try to increase the max current it can deliver and see if it helps. If it does not help, then you probably really have a too high load issue.
I hope it will help you.
Best Regards,
Fred
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-24 10:04 PM
Hello @Fred V.,
The problem can be that the load you apply is too high for the motor to spin. In this situation, the sensorless algorithm cannot operate. Indeed, the sensorless alrorithm relies on an estimation of the back electromotive force of the motor. This Back-EMF is proportional to the rotation speed of the motor. If the rotation speed is too low, the estimated Back-EMF is not reliable enough for the sensorless algorithm to work well. And if the load applied to the shaft of the motor is too high, the motor will not be able to spin fast enough.
Actually, rotation of the speed is maximum speed of the motor. It means b-emf should be enough for the sensorless algorithm. And, load is not too high to spin the motor.
Now, things are usually neither black or white. I suppose that the error you get when you load the motor is a Startup Error.
I get speed feedback error.
Controller cannot handle load. Could the problem be related to the controllers parameters? Or another parameter?
Best Regards
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-25 12:21 AM
Hello @Yasin Türk ,
You are probably right. If you get a speed feedback error, then the system went past the startup phase and the motor is spinning. Do you get this error quickly (right after the transition from the startup, open loop phase to the closed loop, sensorless operation, about 4 or 5 seconds in your case)? If yes, tuning the current controller PID regulators will certainly help. Tuning the observer parameters may also help. I am not an expert in these tuning sa I cannot help you much here.
For the parameters, of the observer:



Best Regards..
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-25 3:38 AM
Hello @Fred V. ,
Do you get this error quickly (right after the transition from the startup, open loop phase to the closed loop, sensorless operation, about 4 or 5 seconds in your case)?
No, I don't get this error quickly. When i run the motor to its maximum speed, I do not get any error. After motor reached its maximum speed, i loaded motor and did not produce any torque. Because of this, my motor has stopped and MC workbench gave speed feedback fault.
I will tune current control pid and Observer G2 parameters and test the motor again.
Thank you for your reply.
Best Regards...
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2022-08-25 9:56 PM
Hello There,
I've solved the problem. It was all about Iq reference value. I've increased the value and my motor has produced more torque to counter load.
Thank you for your help @Fred V..
Best Regards...
Related Content
- STM32F4 USB Device CDC IN DATA stuck after TXFE IRQ; no XFRC IRQ in STM32 MCUs Embedded software
- EVSPIN32G06Q2S1 board damaged during power-up in STM32 MCUs Motor control
- FD-CAN - Protocol Error - ACK Error in STM32 MCUs Products
- STM32 AES GCM Tag mismatch in STM32 MCUs Security
- Problem in Speed Detection Using Dynamic Prescaler(6step mode+hall sensor) in STM32 MCUs Motor control