Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- MEMS and sensors
- MEMS (sensors)
- Why the gyroscope (lsm6ds3) does not measure corre...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Why the gyroscope (lsm6ds3) does not measure correctly on the axis Z?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2019-03-14 11:58 AM
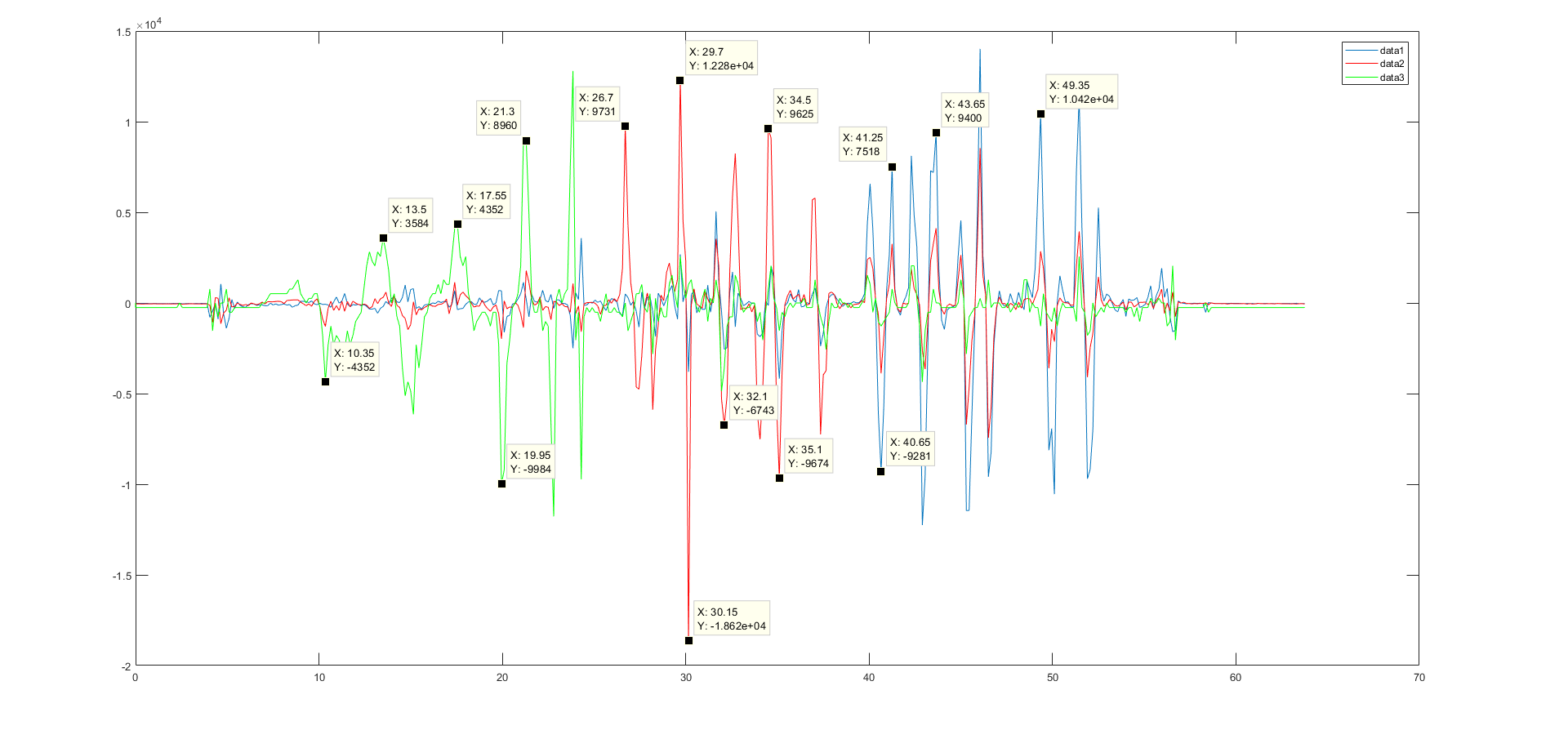
All values on the axis Z are multiples of 256. If you rotate the gyroscope(lsm6ds3) on an axis with angular velocity <256, the value will be 0. I do not observe this on other axes. The values from the gyroscope are shown in the attach figure.
I read using the standard library: link. Code that reads data:
lsm6ds3_gy_flag_data_ready_get(dev_ctx, ®);
if(!reg)
return 1;
memset(data_raw_angular_rate.u8bit, 0x00, 3 * sizeof(int16_t));
lsm6ds3_angular_rate_raw_get(dev_ctx, data_raw_angular_rate.u8bit);
for(int x = 0; x < number_axis; x++)
angular_rate[x] =
data_raw_angular_rate.i16bit[x]What is the reason for this behavior?
P.s. blue - axis Y, red - axiz X, green - axis Z.
Labels:
- Labels:
-
Gyroscopes
{kind=link}
This discussion is locked. Please start a new topic to ask your question.
1 REPLY 1
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2019-05-13 7:09 AM
Hi, are you sure you are reading all the axis correctly? I mean, 2 bytes for x axis, 2 bytes for y axis and 2 bytes for z axis? If you are reading 0 under 256, it's maybe due to last byte missing. However, I suggest you to point out your remark on github forum. Regards
Related Content
- VL53L7CX erratic readings / no data when measuring black object in Imaging (sensors)
- LSM6DSV SFLP Setup with LPF1 and LPF2 in MEMS (sensors)
- Constant short reading after adding 2 mm bandpass filter – VL6180X & VL53L4CD in Imaging (sensors)
- Steval Drone 02 problems in MEMS (sensors)
- Tilt angle on a bicycle using ISM330BX in MEMS (sensors)