Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- MEMS and sensors
- Imaging (sensors)
- vl53l0x sensor detection distance inquiry
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
vl53l0x sensor detection distance inquiry
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-17 10:19 PM
(A translator was used for this inquiry.)
Hi,
I am using the vl53l0x sensor.
I would like to inquire about the detection range of the sensor.
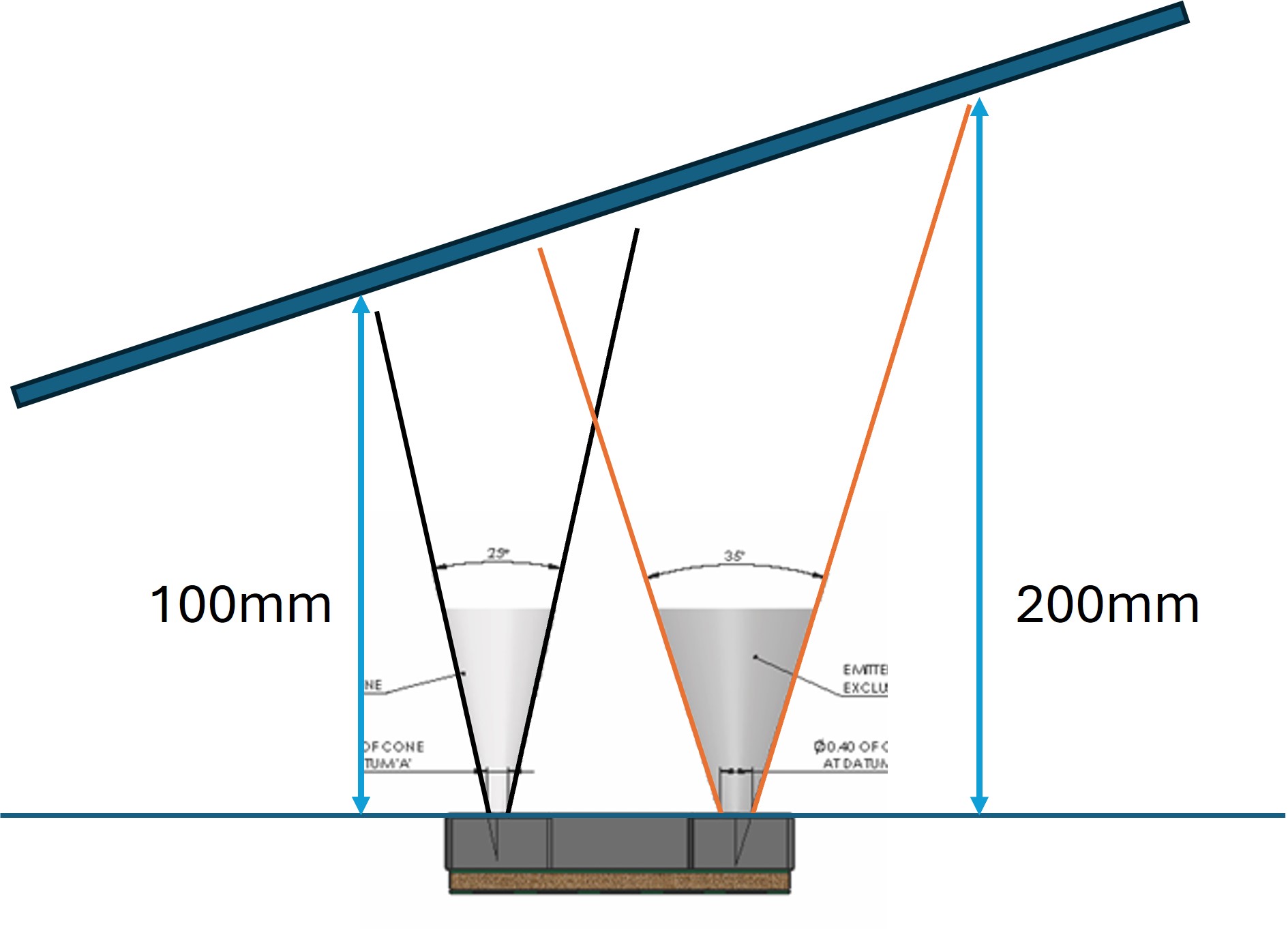
- What value do you get when the wall you want to measure the distance against is tilted? (Refer to image1)
What point distance do you get if the minimum length between the sensor and the wall is 100 mm and the maximum is 200 mm? - I know that the maximum measurement distance of the sensor is 2M.
I would like to know the range of the detectable area when the wall and the sensor are 2M away.
(Refer to image2)
Thank you.
Solved! Go to Solution.
Labels:
- Labels:
-
Time of flight
{kind=link}
{kind=link}
1 ACCEPTED SOLUTION
Accepted Solutions
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-19 09:15 AM
The cone of light - or it' Field of View is 27 degrees.
With a little trig one sees that the diameter of the illumination circle is 1/2 the distance.
The astute reader will do the math and get 0.44 but it's a question of accuracy.
Very near the sensor the FoV is wider, and it narrows as the distance increases.
So, go with 1/2 and you will be as good as you are going to get.
- john
If this or any post solves your issue, please mark them as 'Accept as Solution' It really helps. And if you notice anything wrong do not hesitate to 'Report Inappropriate Content'. Someone will review it.
3 REPLIES 3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-18 07:45 AM
In the first image when you have a slanted wall, you will get the average of all photon return times.
The trouble is that near objects return more photons than a far object. So instead of the mathematical average, you will see a number weighted toward the closer distance.
Unfortunately, how much of this effect you see will depend on the reflectivity of the wall.
As far as a wall at 2M what you get will depend on the reflectivity of the wall. If it's bright enough to return photons you will get 2M and status =0. A less reflective will will give you Staus =2 (low signal). With a REALLY bright target, beyond 4M you will get a status 4. Status 4 means you have a wrap around issue. Wrap-around (also called Aliasing) is a condition where the photons from pulse A get returned after the pulse of pulse A+1. So with a bright wall beyond 4M, you get a Range Status =4 and the correct distance minus the 2M wrap around point.
If this bothers you, a pin-compatible part (VL53L3CX) is available. It's an L0 part with better mathematics.
If this or any post solves your issue, please mark them as 'Accept as Solution' It really helps. And if you notice anything wrong do not hesitate to 'Report Inappropriate Content'. Someone will review it.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-18 06:05 PM
Thank you for your kind reply.
Regarding question 2, I am curious about the detectable area.
The sensor's detection range appears to be gradually expanding in a cone shape.
Then, I would like to know the area of the detectable area from a distance of 2M.
(Part marked with a question mark in Image 2)
Thank you.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-04-19 09:15 AM
The cone of light - or it' Field of View is 27 degrees.
With a little trig one sees that the diameter of the illumination circle is 1/2 the distance.
The astute reader will do the math and get 0.44 but it's a question of accuracy.
Very near the sensor the FoV is wider, and it narrows as the distance increases.
So, go with 1/2 and you will be as good as you are going to get.
- john
If this or any post solves your issue, please mark them as 'Accept as Solution' It really helps. And if you notice anything wrong do not hesitate to 'Report Inappropriate Content'. Someone will review it.