Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- Product forums
- STM8 MCUs
- STM8S SPI: how to use it in 3-wire mode?
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
STM8S SPI: how to use it in 3-wire mode?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2025-01-10 01:46 AM - edited 2025-01-10 02:05 AM
Hello,
I want to connect STM8S003 & ADXL345 (accelerometer) using SPI 3wire mode (lines ~CS, SCK & MOSI as single bidirectional data line).
According to 'RM0016 Reference manual STM8S...', the register SPI_CR2 of STM8S has BDM (Bidirectional data mode enable) & BDOE bits (Input/Output enable in bidirectional mode).
I expected to use these bits to control SPI 3 wire connection:
SPI_CR2 = <BDM=1 | BDOE=1 | SSI=1 | SSM=1 (Master)> - to set STM8 MOSI as output
SPI_CR2 = <BDM=1 | BDOE=0 | SSI=1 | SSM=1 (Master)> - to set STM8 MOSI as input
To exclude possible questions:
1. ADXL345+ATmega8 was tested in 4wire & 3wire modes, all is OK.
2. ADXL345+STM8S003 in 4wire mode works OK. For 3wire mode I've only disconnected line MISO in hardware.
I also can control SPI_CR2 state, chnging it before SPI operations and write the processess using oscilloscope.
Test:
STM8S transmits 0x80 | 0x2C = 0xAC to ADXL345 then it tries to read the answer.
0x80 - read the state of the Register 0x2C of ADXL345.
Result:
When SPI_CR2 = <BDM=0 | BDOE=0 | SSI=1 | SSM=1 (Master)> (4wire mode), oscilloscope shows correct data transmitting (0xAC). As the MISO line is absent, there is not receiving data (see Osc1.jpg).
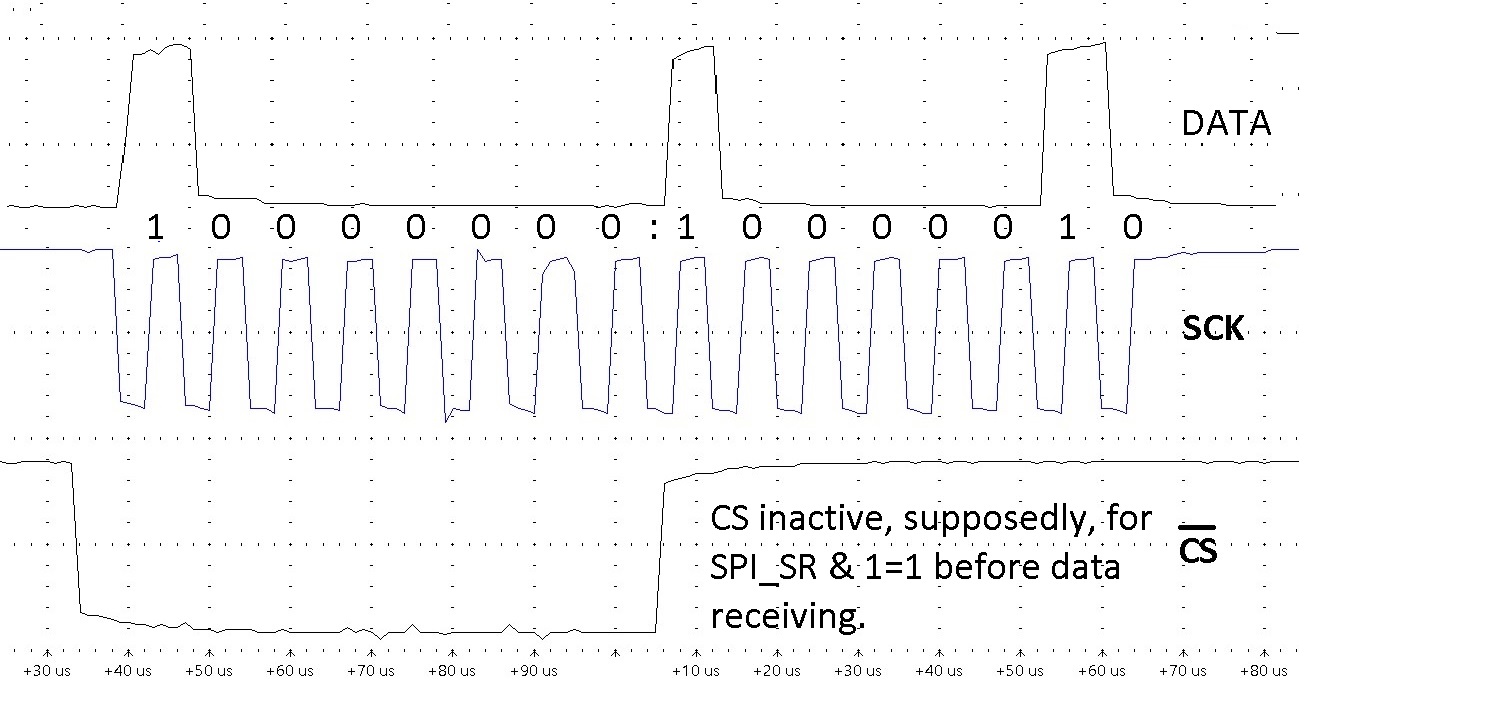
When SPI_CR2 = <BDM=1 | BDOE=1 | SSI=1 | SSM=1 (Master)> (3wire mode), oscilloscope shows incorrect data transmitting: 0x80. (see Osc2.jpg)
Question:
how correctly use BDM & BDOE bits to organize SPI 3wire mode?
or
where one can find an example for SPI 3wire mode?
Examples for SPI 4wire mode are not interesting.
Thanks
#define MISO 7 //all for PORTC
#define MOSI 6
#define SCK 5
//SPI_CR2 bits
#define BDM 7
#define BDOE 6
//SPI_SR bits
#define RXNE 1
#define TXE 2
//~CS pin
#define selectSPI_Device PC_ODR_bit.ODR4=0
#define unselectSPI_Device PC_ODR_bit.ODR4=1
void iniSPI()
{
// CLK_PCKENR1 |=0x02; //Clock to SPI enabled -in CLK.h
/** SCK preset to 1 **/
PC_DDR_bit.DDR5 = 1; //output
PC_CR1_bit.C15 = 1; //push-pull for output
PC_CR2_bit.C25 = 1; //if output, speed up to 10MHz
// PC_ODR_bit.ODR5=0; //SCK=0 - as SPI mode 0 is selected
PC_ODR_bit.ODR5=1; //SCK=1 - as SPI mode 0 is selected
/** CS preset to 1 **/
PC_DDR_bit.DDR4 = 1; //output
PC_CR1_bit.C14 = 1; //push-pull for output
PC_CR2_bit.C24 = 1; //if output, speed up to 10MHz
unselectSPI_Device; //PC4=1
SPI_CR1=(1<<6)|(5<<3)|(1<<2)|(1<<1)|(1<<0); //SPI enabled | baudrate F/64 | Master configuration | CPOL=1| CPHA=1
SPI_CR2=(1<<7)|(1<<6)|(1<<1)|(1<<0); //1<<7: SPI 3wire (BiDirection mode); 1<<6 MOSI as output; 1<<1: NSS pin is not used for SLAVE-MASTER mode, it is selected by 1<<0: Master mode
}
unsigned char rdSPI(unsigned char d)
{
while((SPI_SR & RXNE)==0); //while buffer is empty
unsigned char res=SPI_DR;
return(res);
}
void wrSPI(unsigned char d)
{
SPI_DR = d;
while((SPI_SR & TXE)==0); //while buffer is not empty
}
/////////////////////////////
#define D_out SPI_CR2 |= (1 << BDOE); //SPI_CR2 |=(1<<6); //MOSI as Output
#define D_in SPI_CR2 &= ~(1 << BDOE); //SPI_CR2 &=~(1<<6); //MOSI as Input
void DelaySmall()
{
__no_operation();
__no_operation();
__no_operation();
__no_operation();
}
void iniADXL()
{
//D_out;
selectSPI_Device; //FullRes, LeftJust, Range16g(200g)
wrSPI(0x31);
wrSPI(0x40 | 0x08 | 0x04 | 0x03); // SPI 3wire | FullResolution | LeftJustify | Range 16/200g (ADXL345/375)
unselectSPI_Device;
}
///////////////////////////////
void getRg2C()
{
D_out;
selectSPI_Device;
wrSPI(0x2c | 0x80); //Rg0x2C | 0x80 (read state of single Rg 0x2c)
D_in;
T[0]=rdSPI(0xFF); //0xE5 -ID of ADXL345 & ADXL375
unselectSPI_Device;
D_out;
}
//////////////////
void main()
{
//Here UART, TIMERS, CLK, ... are initialized
iniADXL();
while(1)
{
// If UART command is discovered, it'll be exec:
// cmd set STM8S' Rg SPI_SR2 <byte to set>
// cmd getRg2C()
}
}
{kind=link}
{kind=link}
0 REPLIES 0
Related Content
- Can't get stm8s003f3p6 to work with LCD1602! in STM8 MCUs
- Migrating From Dunfell to Kirkstone LCD over SPI using FBTFT no longer working in STM32 MPUs Embedded software and solutions
- How to drive the screen like ili9341 with tinyDRM? anyone succeed? in STM32 MPUs Boards and hardware tools
- STM32H5x and SPI DMA Transfer issue in STM32 MCUs Products