Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Motor control
- Bug/Problem in MC library driving low inductance m...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Bug/Problem in MC library driving low inductance motors?
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2019-09-22 10:44 AM
I'm using motor control hardware very close to NUCLEO-G431RB with X-NUCLEO-IHM08M1 3Sh. It has only a bit different bus voltage and current feedback scaling resistors so I was able to spin the motor it with the motor profiler. The results were quite close as measured, RS=0.1 ohm and LS=0.08 mH. So I know that the hardware works.
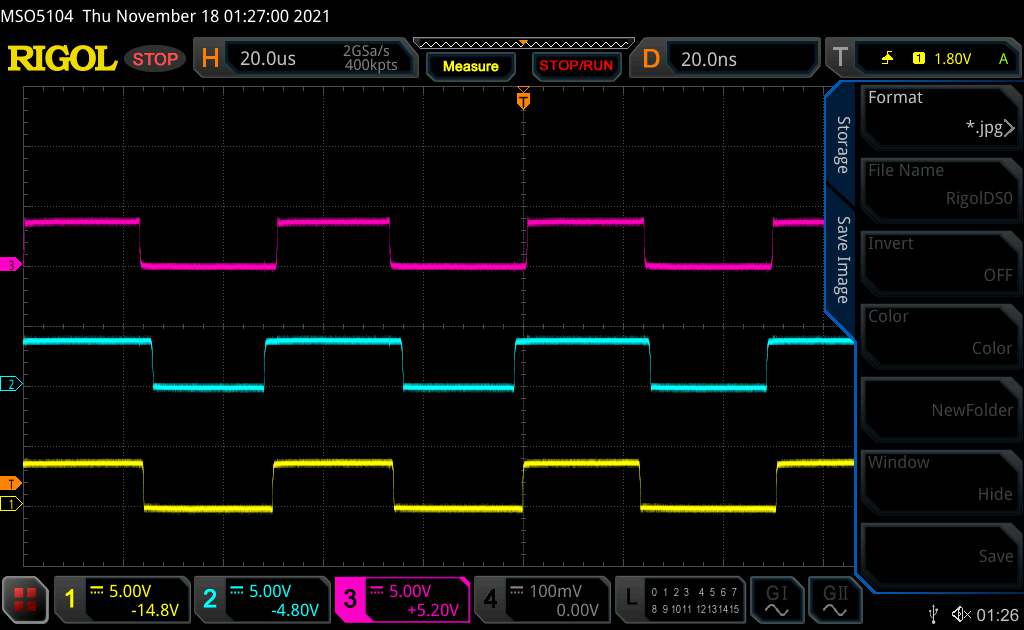
Now when I configure the parameters in the MC Suite, it results in around 50% constant PWM phase output, exactly same for all U, V and W channels. Which obviously does not make any sense.. At the end there's an oscilloscope picture of U and V running at 10 kHz. Same figure is acquired with 30kHz too.
If I raise the inductance value closer to 1 mH, the PWM starts to get correct shape, but this is too big of an inductance value to make the motor spin, it just does not work. I tried to chase the possible bug/problem/issue where the PWM is configured according to the parameters derived from LS, but this seems to end up in the libmc closed library...
I'm using the latest MC Suite (5.4.1), CubeMX (5.3.0) with SW4STM32 IDE.
Anyone has experienced similar problems? Any workarounds?

Labels:
- Labels:
-
STM32 Motor Control
This discussion is locked. Please start a new topic to ask your question.
4 REPLIES 4
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2019-09-28 4:21 AM
Answering to myself: there was no problem relating to the low inductance. I didn't mention, but the motor is pretty big (rated to 3kW) so I totally underestimated the required rev-up currents. After reconfiguring the startup conditions with MC SDK, the motor started spinning just fine!
By the way, now when the basic setup works for the motor, the on-the-fly motor startup and speed ramps work like a charm. I'd say that the MC SDK makes BLDC motor control pretty easy when the hardware is close to the evaluation boards.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2021-06-27 9:50 PM
The question has been moved from the "Motor Control Hardware" section to the "STM32 Motor Control" section (the question is about the STM32 MC SDK).
Best regards
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2021-11-17 9:46 AM
{kind=link}
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2023-03-17 12:48 AM
Hi. Have you solve the issue with quadrature encoder?
thx!
Related Content
- USBX Host MSC on Nucleo-H753ZI not recognizing Thumb Drive (HSI48 + CRS configuration) in STM32 MCUs Embedded software
- STM32G0B1RE + CAN-FD 4 (NCV7344) - CAN FD frames not reaching receiver Raspberry Pi (MCP2517FD) in STM32 MCUs Products
- BLDC motor drive in STM32 MCUs Motor control
- STM32H753 SPI6 Slave (H7 SPI v2) — Frame qualifies only with NSS-synchronised arming in STM32 MCUs Embedded software
- NUCLEO-N657 schematic discrepancy vs AN5967 regarding VDDA18PMU / VDDSMPS in STM32 MCUs Boards and hardware tools