Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- STM32 MCUs
- STM32 MCUs Embedded software
- MODBUS RTU Communication Issue: No Response from A...
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
MODBUS RTU Communication Issue: No Response from AC Servo Drive (NUCLEO-F446RE)
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-09-26 2:51 AM - last edited on 2024-09-26 3:38 AM by mƎALLEm
Hello everyone,
I’m working on a project where I’m using a NUCLEO-F446RE board to control an AC servo drive via MODBUS RTU. I’m using a TTL to RS485 converter to handle the communication. The problem I’m facing is that I get no response from my servo drive when sending MODBUS RTU frames from the NUCLEO board.
I’ve already tried the same setup using an Arduino Mega, and everything works perfectly – I can communicate with the servo drive and control it without any issues. So, I believe the issue might be with my program or the way MODBUS RTU is being handled on the NUCLEO board.
Here’s the setup I'm using:
- Controller: NUCLEO-F446RE
- Converter: TTL to RS485 converter
- MODBUS Communication: USART1 (PA10 Rx, PA9 Tx, PA8 DE, PA7 RE)
- Servo Drive Baud Rate: 38400, no parity, 2 stop bits
I’ve attached my program below, and I’d appreciate it if anyone could help me identify where the issue might be.
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include <string.h>
#include "stm32f4xx_hal.h"
#include "core_cm4.h" //ITM functions
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
// Define the GPIO port and pins for DE/RE control
#define DE_RE_GPIO_PORT GPIOA // Change to your actual port
#define DE_PIN GPIO_PIN_8 // Change to the actual pin used for DE
#define RE_PIN GPIO_PIN_7 // Change to the actual pin used for RE
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
uint8_t modbus_frames[][8] = {
{0x01, 0x06, 0x60, 0x02, 0x00, 0x40, 0x37, 0xFA},
{0x01, 0x06, 0x62, 0x00, 0x00, 0x01, 0x57, 0xB2},
{0x01, 0x06, 0x62, 0x01, 0x00, 0x03, 0x87, 0xB3},
{0x01, 0x06, 0x62, 0x02, 0x0D, 0x40, 0x32, 0xD2},
{0x01, 0x06, 0x62, 0x03, 0x02, 0x58, 0x66, 0xE8},
{0x01, 0x06, 0x62, 0x04, 0x00, 0x32, 0x56, 0x66},
{0x01, 0x06, 0x62, 0x05, 0x00, 0x32, 0x07, 0xA6},
{0x01, 0x06, 0x60, 0x02, 0x00, 0x10, 0x37, 0xC6}
};
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
/* USER CODE BEGIN PFP */
void MODBUS_Transmit(uint8_t *data, uint16_t size);
void Set_DE_RE_High(void);
void Set_DE_RE_Low(void);
int __io_putchar(int ch); //for SWV
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
// Loop through and transmit each MODBUS frame
for (int i = 0; i < sizeof(modbus_frames) / sizeof(modbus_frames[0]); i++)
{
// Transmit MODBUS frame
MODBUS_Transmit(modbus_frames[i], 8);
// Delay for receiving response
HAL_Delay(2000);
// Here, you can write your code to read and print the response from the drive
// After transmitting, wait to receive and print received data
uint8_t rx_buffer[40]; // Buffer to hold incoming data
if (HAL_UART_Receive(&huart1, rx_buffer, sizeof(rx_buffer), 2000) == HAL_OK) // 2 second timeout
{
printf("Received: ");
for (int j = 0; j < sizeof(rx_buffer); j++)
{
printf("%02X ", rx_buffer[j]);
}
printf("\r\n");
}
else
{
printf("No response received.\r\n");
}
HAL_Delay(4000); // Delay before sending next frame
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 16;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief USART1 Initialization Function (MODBUS)
* @PAram None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 38400;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_2;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @PAram None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : USART_TX_Pin USART_RX_Pin */
GPIO_InitStruct.Pin = USART_TX_Pin|USART_RX_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : LD2_Pin */
GPIO_InitStruct.Pin = LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
// MODBUS Transmit function
void MODBUS_Transmit(uint8_t *data, uint16_t size)
{
Set_DE_RE_High(); // Enable transmission (DE=High, RE=High)
// Transmit data over UART
HAL_UART_Transmit(&huart1, data, size, HAL_MAX_DELAY);
Set_DE_RE_Low(); // Enable reception (DE=Low, RE=Low)
printf("Transmitted: ");
for (int i = 0; i < size; i++)
{
printf("%02X ", data[i]);
}
printf("\r\n");
}
// Set DE and RE high to enable transmission
void Set_DE_RE_High(void)
{
HAL_GPIO_WritePin(DE_RE_GPIO_PORT, DE_PIN, GPIO_PIN_SET);
HAL_GPIO_WritePin(DE_RE_GPIO_PORT, RE_PIN, GPIO_PIN_SET);
}
// Set DE and RE low to enable reception
void Set_DE_RE_Low(void)
{
HAL_GPIO_WritePin(DE_RE_GPIO_PORT, DE_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(DE_RE_GPIO_PORT, RE_PIN, GPIO_PIN_RESET);
}
// Redirect printf to SWV (ITM)
int __io_putchar(int ch)
{
ITM_SendChar(ch); // Use ITM to send data via SWV
return ch;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @PAram file: pointer to the source file name
* @PAram line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
}
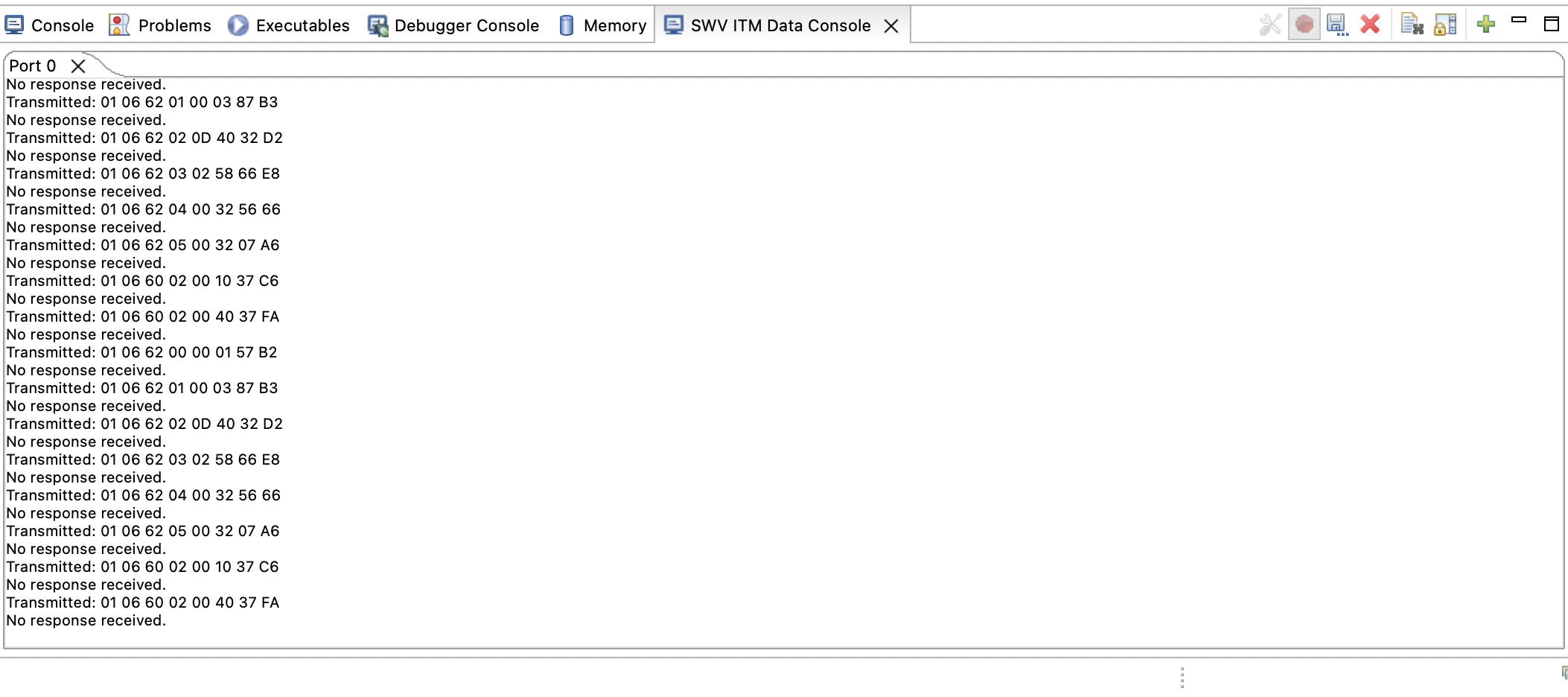
#endif /* USE_FULL_ASSERT */And i've attached a image of the output i'm receiiving.
Thank you!
Labels:
- Labels:
-
STM32F4 Series
{kind=link}
3 REPLIES 3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-09-26 3:38 AM
Hello @tnishanthraj ,
Please kindly use </> button to paste your code. I'm editing your post then ..
You can refer to tips in this link on how to post a thread in this community.
Thank you for your understanding.
To give better visibility on the answered topics, please click on "Accept as Solution" on the reply which solved your issue or answered your question.
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-09-26 3:40 AM
Sure! Thank you. Will follow it next time :)
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2024-09-26 6:13 AM - edited 2024-09-26 6:19 AM
Arduino ttl is 5V. So if your ttl to rs485 is 5v type, the transmitted data may not be correct. What you can do is to connect another rs485 parallel and read the data to know if the transmit is good or receive is good.
If you can do the receive using interrupt, it's better since we don't know the exact time at which the response is received
If you feel a post has answered your question, please click "Accept as Solution".
Related Content
- STM32WB09 AoA: Unstable/Incorrect IQ Reports with 4-Antenna Switching Setup in STM32 MCUs Wireless
- STM32G431 Bootloader issue in STM32 MCUs Products
- STM32C011J4M - issue with pin overlapp in STM32 MCUs Products
- Wild issue! STM32H7S78 stuck after DA provisioning! in STM32 MCUs Security
- Send command 0x7F with Teraterm while in bootloader mode in Others: STM32 MCUs related