Motor with encoder and FOC spinning poorly and roughly at low speed
Hi everyone, I’m using the X-NUCLEO-IHM08M1 with the g474re core and a BL23E33-01D-04RO motor (which reaches 4000 rpm).
I want to use FOC and the motor’s internal encoder, so I’ve made the hardware modifications described in the IHM08M1 manual and those also required by MC Workbench before code generation. I have therefore set the main sensor to the encoder and the auxiliary sensor to the sensorless PLL+observer.
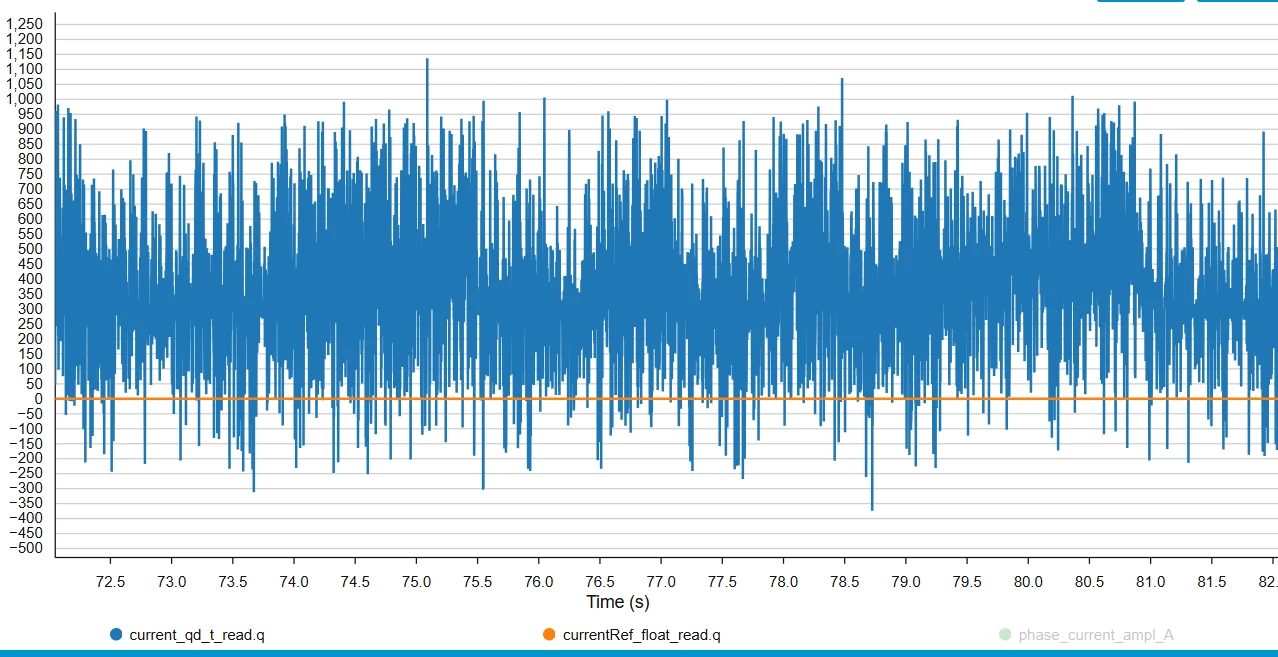
In STM32CubeIDE, the motor runs smoothly and the speed is correct, but at low speeds (below 60 rpm) it freezes and sometimes lags... I have no reported firmware errors. I don't have any load connected to the motor (yet).
What could be causing this? PID?
I can provide screenshots of the signals you want; I’m using CubeMonitor.
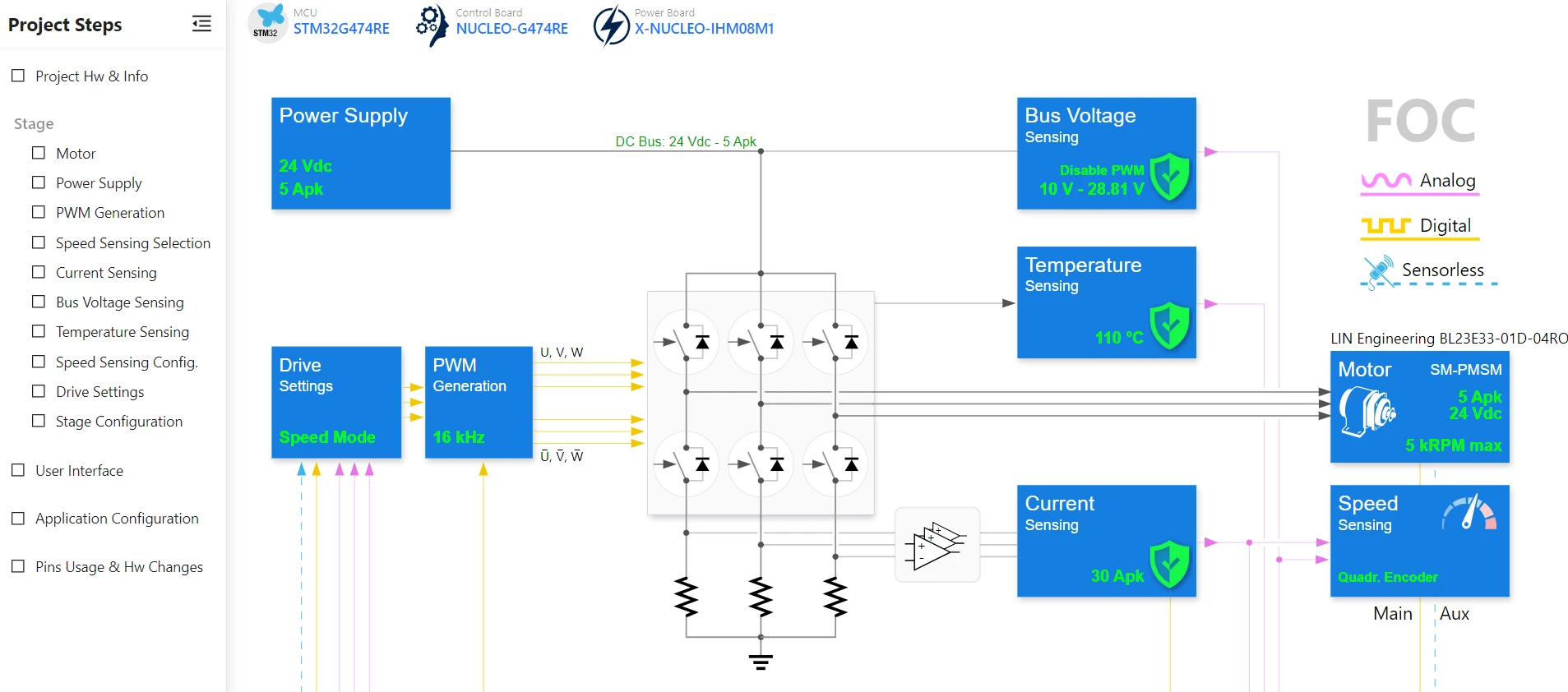
PWM: 16kHz
SW dead time 850ns
Regulator execution time: 63us (1 PWM) - three shunt
Gain: 5.18
Bus voltage divider: 19.17
Quadrature encoder:
- average FIFO depth = 16
- Input capture filter duration = 0.75 us
PID: autocalculate Kp & Ki for both current and speed regulator
-------------------------------------30 rpm - motor not spinning or spinning poorly/roughly----------------------------------------------------------
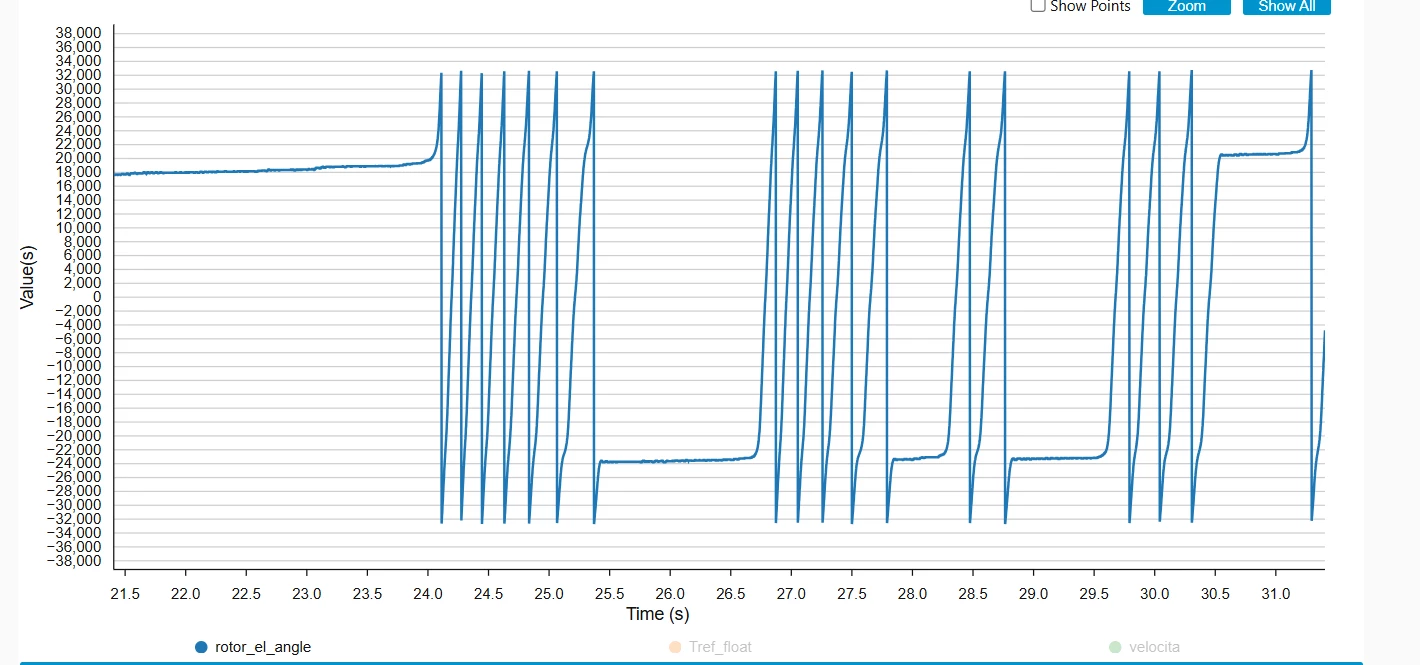
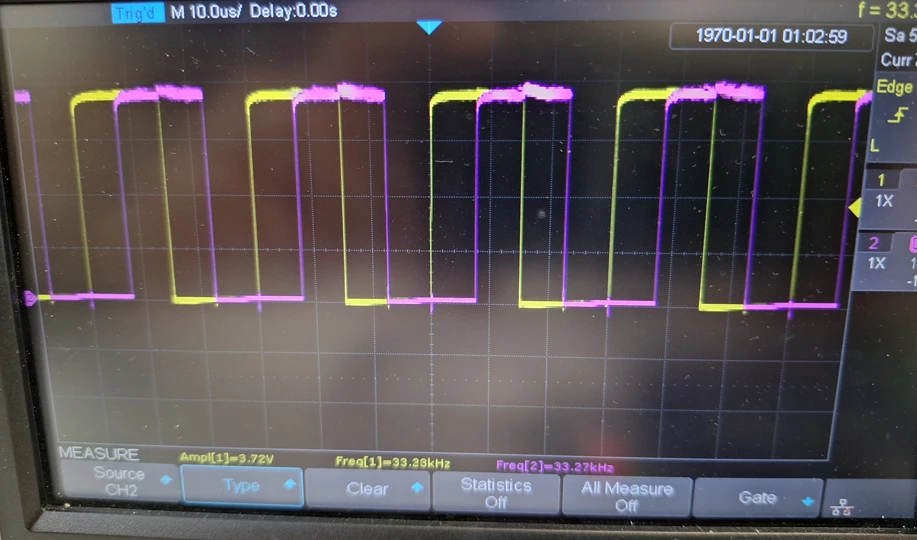
Encoder from oscilloscope:
https://streamable.com/2xdrsx
(If the link expires, let me know and I'll update it)
-----------------------------------------------------------------2000 rpm--------------------------------------------