Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Showing results for
- STMicroelectronics Community
- MEMS and sensors
- MEMS (sensors)
- Calibration of LSM6DS3
Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Calibration of LSM6DS3
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-07-06 08:51 PM
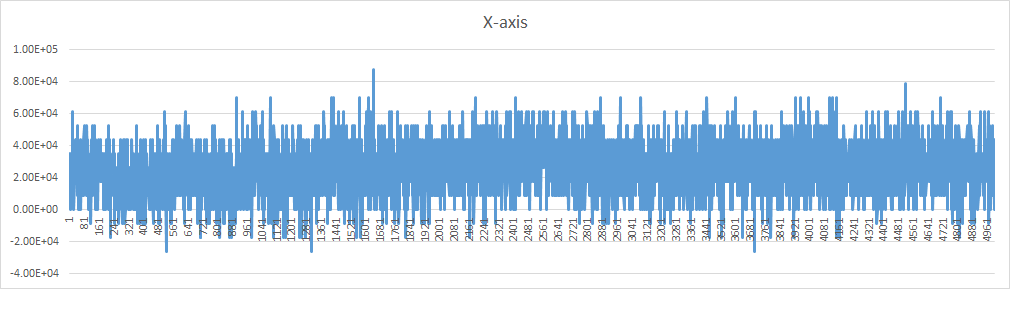
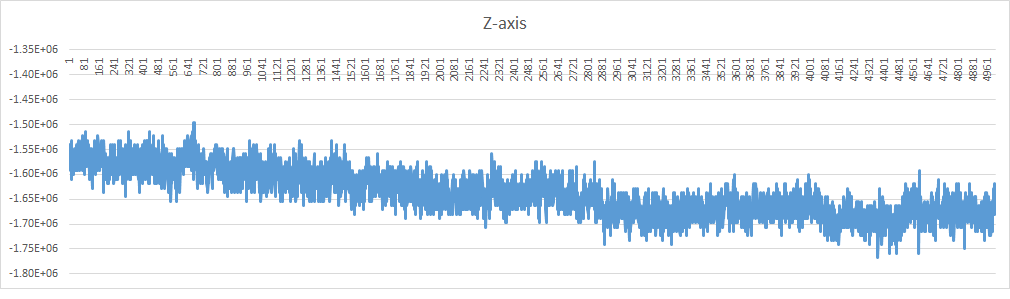
I am using LSM6DS3. I got very strange values of gyroscope and accelerometer. I save some data of gyroscope at static position and figures of gyroscope data at static position is attached. Does LSM6DS3 needs calibration? Or we don't need to celebrate the LSMDS3? It is very difficult to arrange rotation table by calibration and sometime impossible?
{kind=link}
{kind=link}
{kind=link}
1 REPLY 1
Options
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Email to a Friend
- Report Inappropriate Content
2020-07-07 01:37 AM
Hi @MHass.1 , regarding the y axis of your graphs, are the values in "dps" units? And do they refer to the gyroscope acquisition? Assuming that the master-slave communication is OK, I would suggest you to check if you properly configured the LSM6DS3 device and if you are well decoding the data, by checking the C code examples on Github repository at this link, for example the lsm6ds3_read_data_polling.c file. Regards
/* Restore default configuration */
lsm6ds3_reset_set(&dev_ctx, PROPERTY_ENABLE);
do {
lsm6ds3_reset_get(&dev_ctx, &rst);
} while (rst);
/* Enable Block Data Update */
lsm6ds3_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
/* Set full scale */
lsm6ds3_xl_full_scale_set(&dev_ctx, LSM6DS3_2g);
lsm6ds3_gy_full_scale_set(&dev_ctx, LSM6DS3_2000dps);
/* Set Output Data Rate for Acc and Gyro */
lsm6ds3_xl_data_rate_set(&dev_ctx, LSM6DS3_XL_ODR_12Hz5);
lsm6ds3_gy_data_rate_set(&dev_ctx, LSM6DS3_GY_ODR_12Hz5);
/* Read samples in polling mode (no int) */
while(1)
{
uint8_t reg;
/* Read output only if new value is available */
lsm6ds3_xl_flag_data_ready_get(&dev_ctx, ®);
if (reg)
{
/* Read acceleration field data */
memset(data_raw_acceleration.u8bit, 0x00, 3 * sizeof(int16_t));
lsm6ds3_acceleration_raw_get(&dev_ctx, data_raw_acceleration.u8bit);
acceleration_mg[0] =
lsm6ds3_from_fs2g_to_mg(data_raw_acceleration.i16bit[0]);
acceleration_mg[1] =
lsm6ds3_from_fs2g_to_mg(data_raw_acceleration.i16bit[1]);
acceleration_mg[2] =
lsm6ds3_from_fs2g_to_mg(data_raw_acceleration.i16bit[2]);
sprintf((char*)tx_buffer, "Acceleration [mg]:%4.2f\t%4.2f\t%4.2f\r\n",
acceleration_mg[0], acceleration_mg[1], acceleration_mg[2]);
tx_com(tx_buffer, strlen((char const*)tx_buffer));
}
lsm6ds3_gy_flag_data_ready_get(&dev_ctx, ®);
if (reg)
{
/* Read angular rate field data */
memset(data_raw_angular_rate.u8bit, 0x00, 3 * sizeof(int16_t));
lsm6ds3_angular_rate_raw_get(&dev_ctx, data_raw_angular_rate.u8bit);
angular_rate_mdps[0] =
lsm6ds3_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[0]);
angular_rate_mdps[1] =
lsm6ds3_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[1]);
angular_rate_mdps[2] =
lsm6ds3_from_fs2000dps_to_mdps(data_raw_angular_rate.i16bit[2]);
sprintf((char*)tx_buffer, "Angular rate [mdps]:%4.2f\t%4.2f\t%4.2f\r\n",
angular_rate_mdps[0],
angular_rate_mdps[1],
angular_rate_mdps[2]);
tx_com(tx_buffer, strlen((char const*)tx_buffer));
}
}
Related Content
- Machine Learning method and tools for VL53L8CX and VL53L8CH in Imaging (sensors)
- Do LSM6DSV SFLP change the factory calibration values? in MEMS (sensors)
- Ways to reduce the impact of cover glass in Imaging (sensors)
- VL53L7CX range fluctuation in Imaging (sensors)
- VL53L4CX meaning of CalibrationData in Imaging (sensors)